
はや2NOWの歩き方2:
中利得アンテナはどっちを向いている!?
2020年12月6日(日本時間)にカプセルを地上へ届けた探査機はやぶさ2は、地球最接近・スイングバイを経て「拡張ミッション」へと歩みを進めています。
「はやぶさ2」の運用状況がリアルタイムでわかるウェブコンテンツ「はや2NOW(Haya2NOW)」は2018年に公開され、2021年4月28日の「拡張版はや2NOW」紹介記事にて、拡張ミッション向けのリニューアルをご報告いたしました。
今回は、探査機が地球と通信する際に使用する「通信系機器」のうち「中利得アンテナ」の「向き」というマニアックな情報の読み方についてご紹介します。なお「中利得アンテナ」を含む通信系機器について、はや2NOW上での表示の概要は2021年4月28日の「拡張版はや2NOW」紹介記事における項目「F・H・I・J・K」をご覧下さい。
「中利得アンテナ(MGA:Middle Gain Antenna)」は、はやぶさ2が持つX帯通信用アンテナの1つで、全アンテナのうち唯一その方向をアンテナ自身で変えることが出来ます。図1の通り、四角錐を逆さにした様な形状のホーンアンテナが2軸ジンバル機構の上に配置されており、探査機上面のイオンエンジン付近に搭載されています。ジンバル機構とは1つまたは複数の軸を中心に物体を回転させる回転台のことで、2軸ということでつまり2つの軸でホーンアンテナの方向を回転させることができます。カメラ三脚の首振りのイメージです。はやぶさ2の中利得アンテナでは、2つの軸それぞれにモーターが搭載されています。このジンバル機構のモーターを駆動することによって、ホーンの向きを探査機機軸方向(太陽電池パドルに垂直な方向)周りに回転する「方位角」と、探査機上面(太陽電池パドル面)から見て機軸方向へと起き上がる「仰角」を変化させることが出来ます。
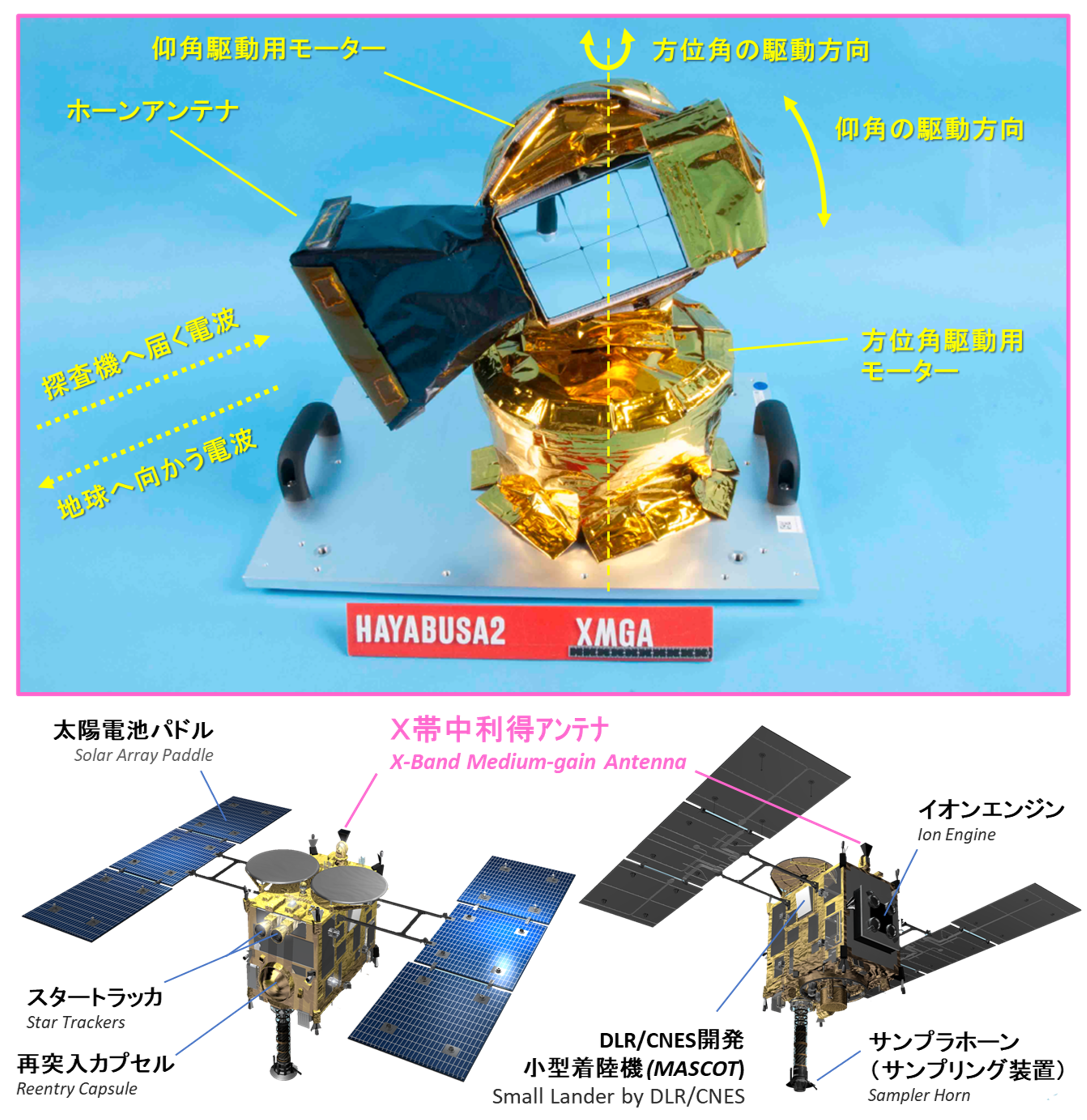
図1:中利得アンテナ(MGA)の搭載位置
はや2NOW上での「方位角」と「仰角」の表示位置は図2の通りです。この中利得アンテナは、巡航運用期間の主力を担うアンテナです。軌道上の位置によって時々刻々と変化する地球方向に併せ、基本的に毎週1回、火曜日の運用で向きを変更しています。
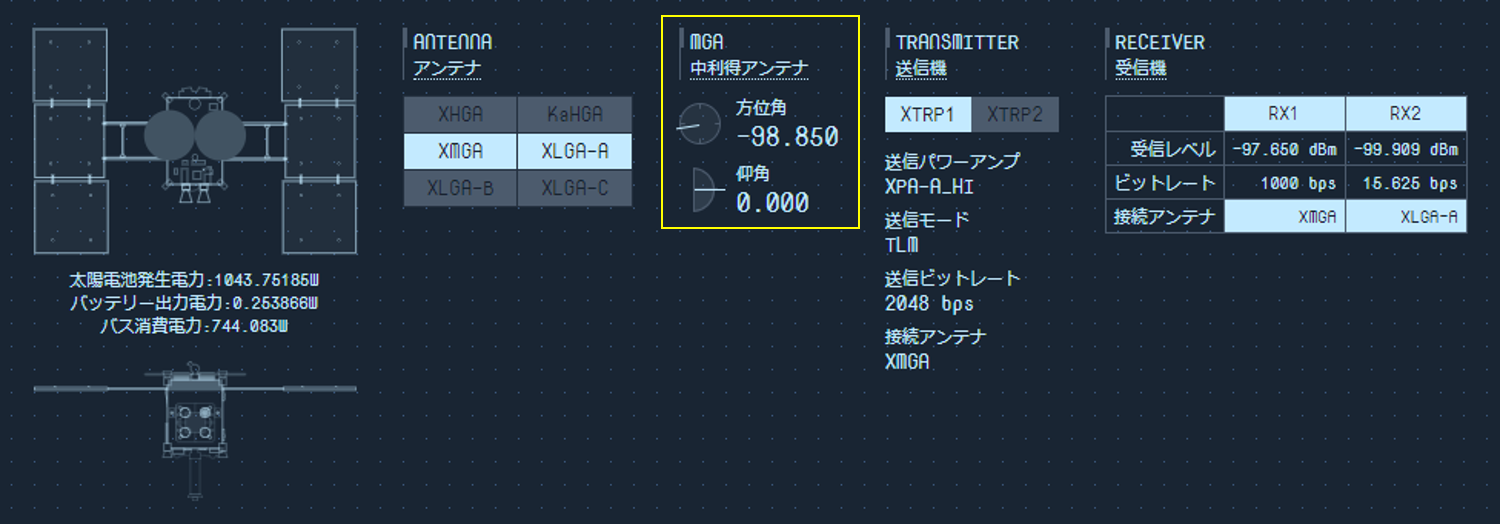
図2:はや2NOWにおける中利得アンテナ「方位角」と「仰角」の表示位置(2021/08/30時点の情報)
はじめに、中利得アンテナから見た探査機座標系の各軸方向について、図3をご覧下さい。探査機座標系というのは探査機上の位置や探査機から見た方向を定義するために、便宜上探査機上に固定された座標軸のことです。ZSC軸は探査機の機軸方向に取り、高利得アンテナが向いている天頂側を+ZSCとします。XSC軸はZSC軸に垂直で、イオンエンジン搭載方向を+XSCにとり、反対側の今は無き「カプセル」や「スタートラッカー」そして「はやツーくんのお顔」がある方向に-XSC取ります。ZSC軸とXSC軸に垂直な方向へYSC軸を取り、かつてMASCOT着陸機が搭載されていた方向を-YSCとします。なお、各軸の添字SCはSpacecraft(探査機)の略で、探査機座標系の座標軸であることを示しています。
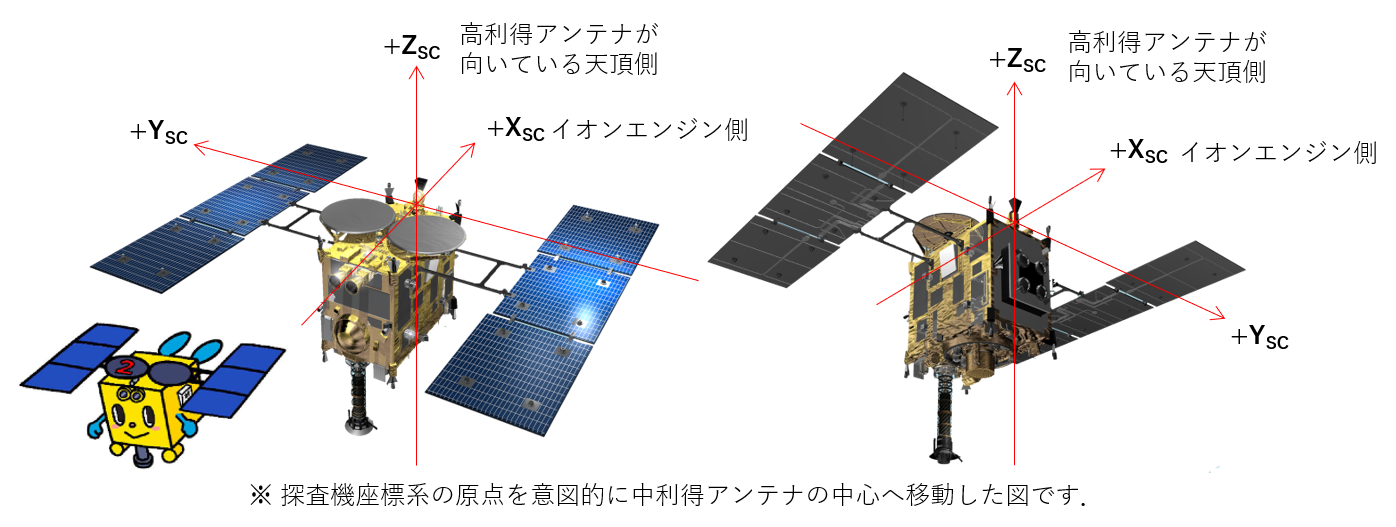
図3:探査機座標系の座標軸が示す方向
それでは中利得アンテナの「方位角」と「仰角」の読み方をご紹介します。図4のポンチ絵をご覧下さい。「方位角」は探査機+YSC方向から+ZSC周りに5°回転させた位置を基準として、最大178°回転させることが出来ます。「方位角」を回転させることで「仰角」を駆動するためのモーターが乗った台が回転します。その台上にYMGAという軸を定義すると、図3左上の様に、+YMGA方向が+ZSC周りに「方位角」の分だけ回転することになります。次に「仰角」は+YMGA方向から+ZSC方向に24°起き上がった方向を起点として、さらに起き上がる方向へ175°回転させることが出来ます。なお、「方位角」も「仰角」もはや2NOW上では回転すればするほどマイナス方向に大きな値として表示されることにご注意下さい。図4左図の「方位角」と右図の「仰角」共に、ピンク色の破線で示した範囲内(方位角は0°から-178°、仰角は0°から-175°)の値を取ることが出来ます。
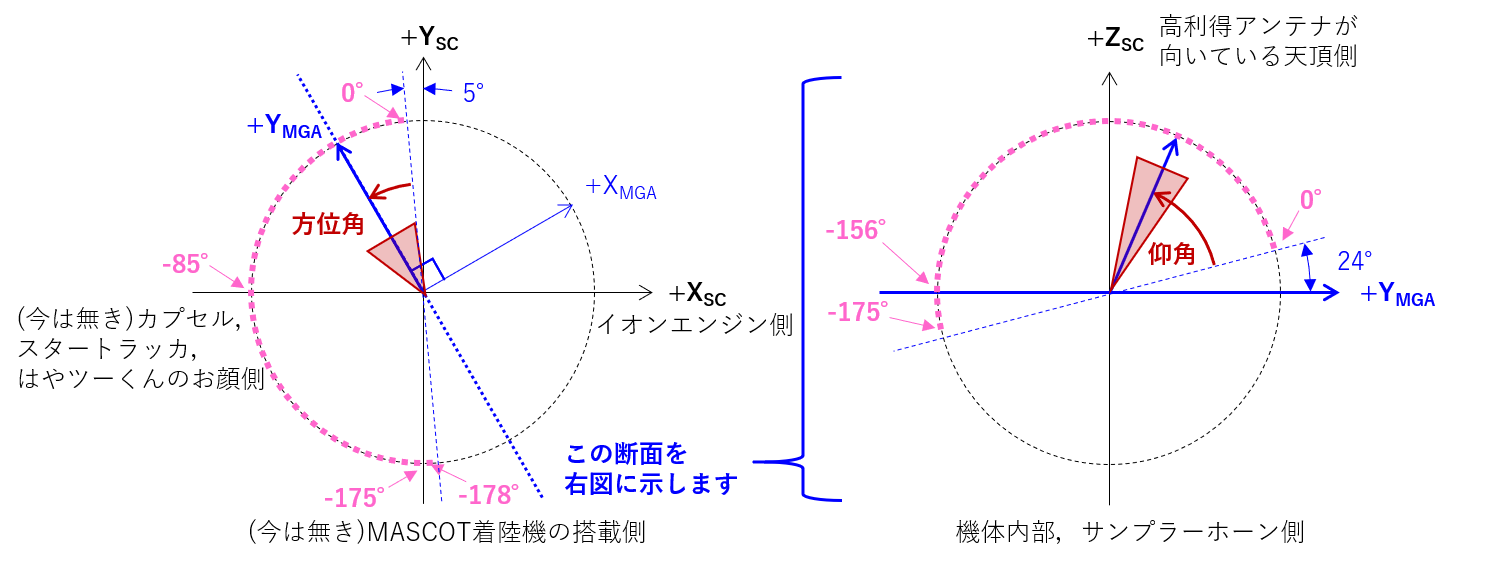
図4:方位角・仰角と探査機座標系の関係
(左図:天頂側(+ZSC側)から見た方位角の定義、右図:仰角の定義)
それでは、いくつか代表的な中利得アンテナ指向方向と、それぞれの向きに応じた「方位角」と「仰角」の値について見ていきましょう。図5の(例1)は最もイオンエンジン側かつ下方に向けた場合です。「方位角」は-XSC側にしか駆動出来ないため、+XSC側へホーンを向けたい場合は「仰角」を-66°よりも深く駆動させる必要があり、この例では最大の-175°まで駆動しています。次に図6の(例2)は逆に最もカプセル側かつ浅い方向を覗く場合です。先ほどの(例1)と同じ「方位角」ですが「仰角」が0°であることが分かります。図7の(例3)はホーンを天頂方向へ向ける際の定位置です。天頂へ向けるためには「仰角」を-66°にしておけば「方位角」はどんな値をとっても良いことになります(特異点)。ですが、運用上は天頂を向く際の「方位角」を-85°へ固定し、分かりやすく管理しています。最後の(例4)は+YSC方向から+ZSC側へ45°傾けたケースです。「方位角」の駆動範囲の都合上わざわざ-175°まで駆動した上で、「仰角」を-111°まで大きく回転させる必要があります。
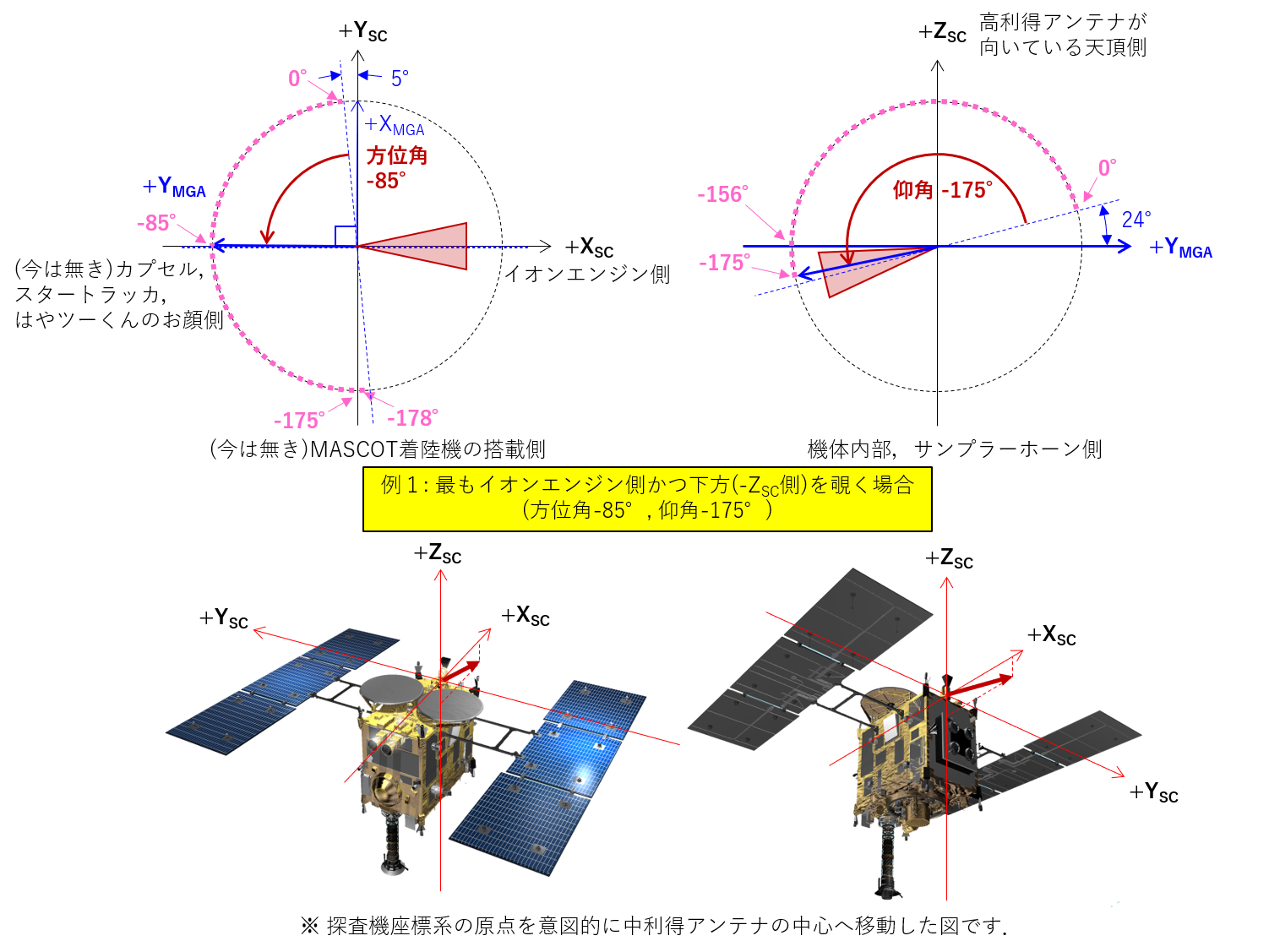
図5:(例1)最もイオンエンジン側かつ下方を覗く場合(方位角-85°、仰角-175°)
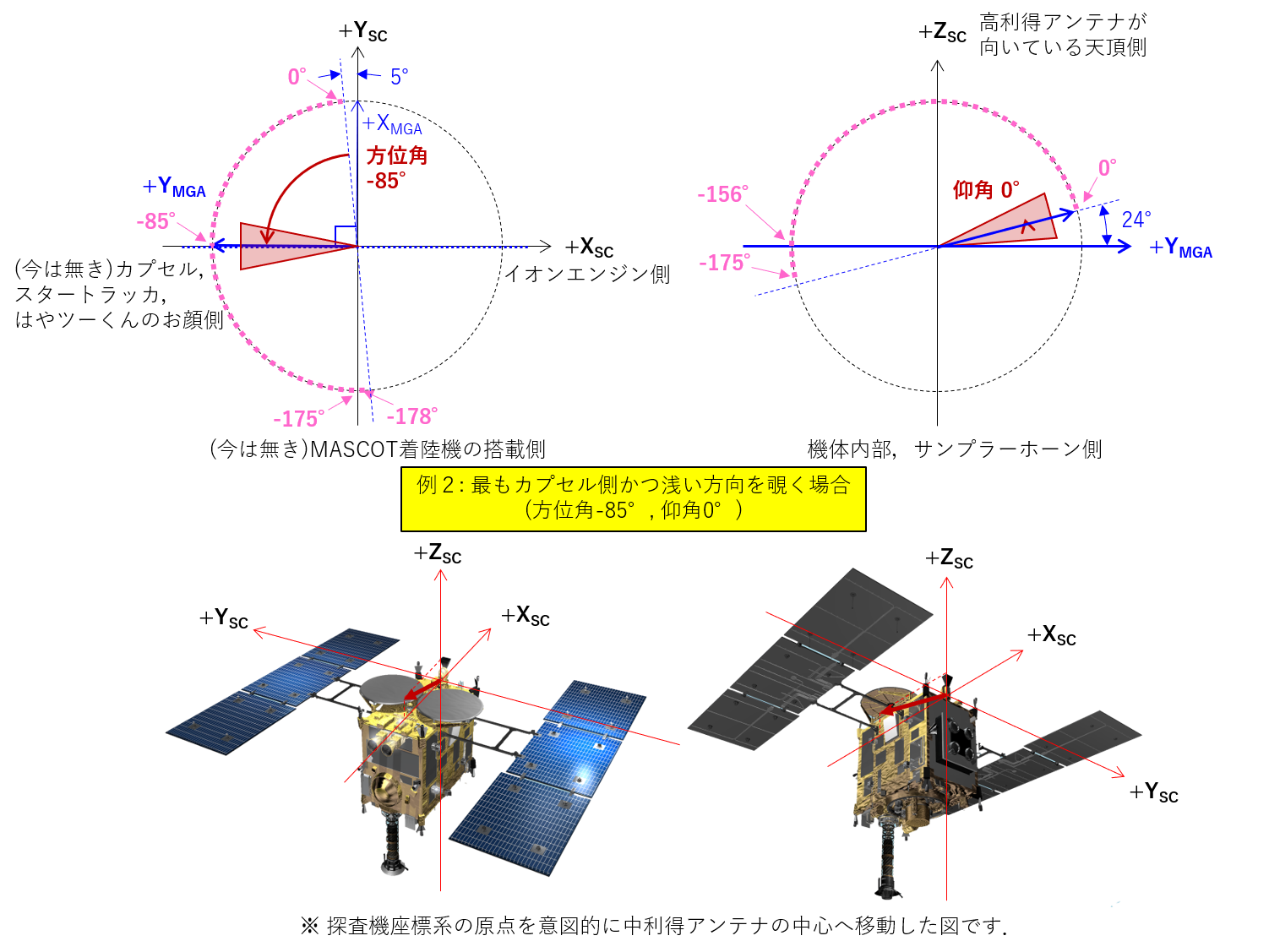
図6:(例2)最もカプセル側かつ浅い方向を覗く場合(方位角-85°、仰角0°)
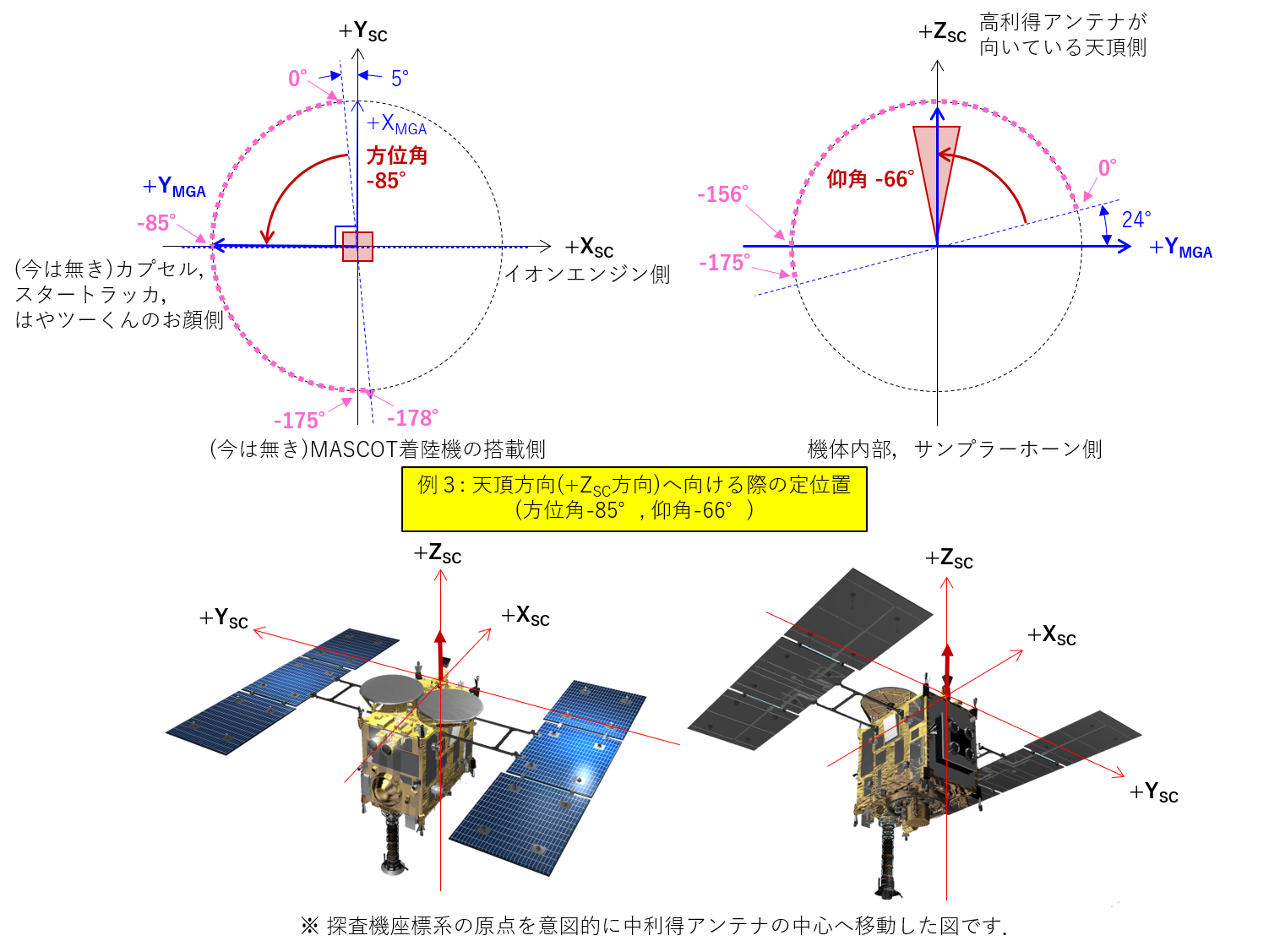
図7:(例3)天頂方向(+ZSC方向)へ向ける際の定位置(方位角-85°、仰角-66°)
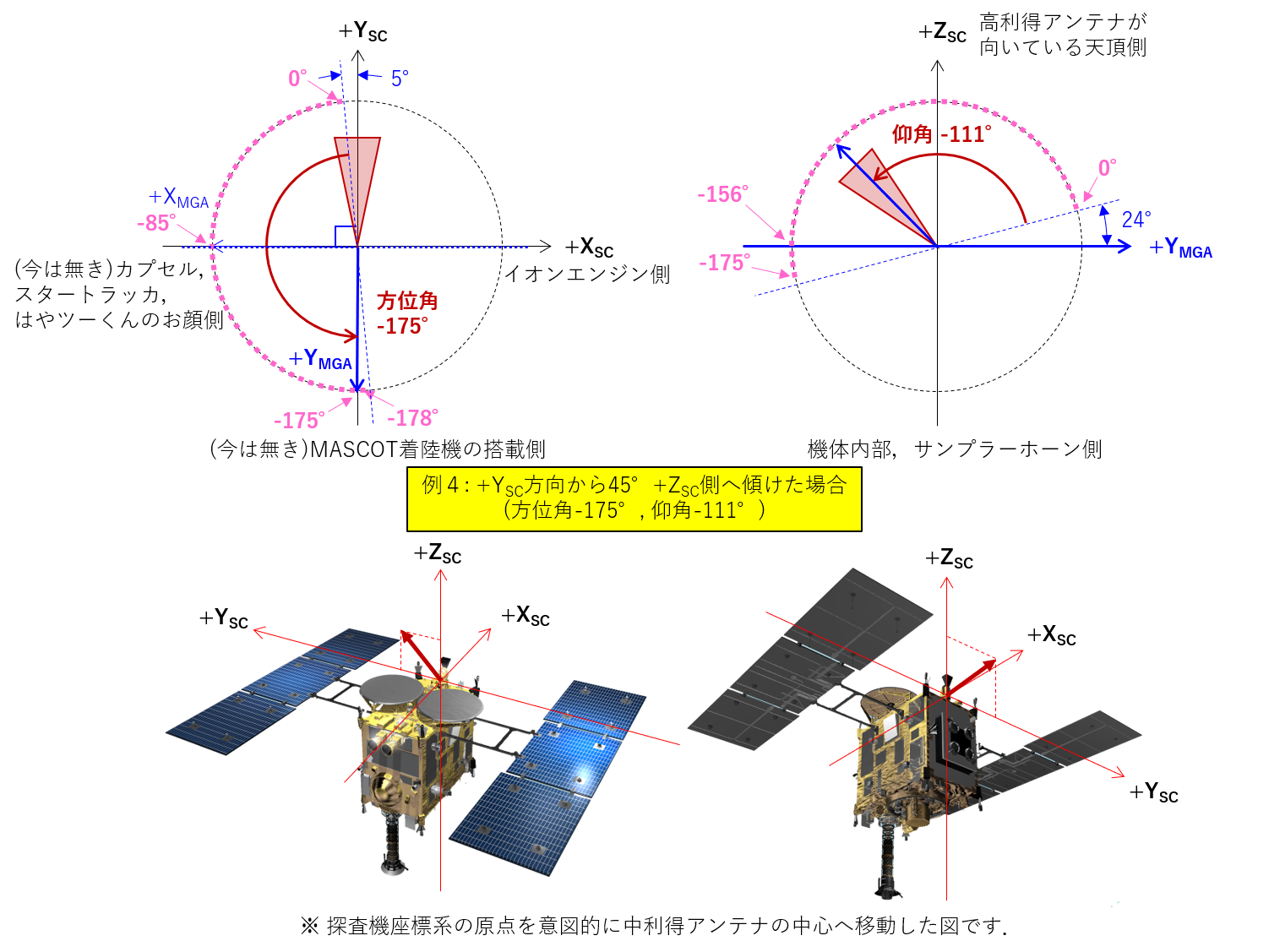
図8:(例4)+YSC方向から45°+ZSCへ傾けた場合(方位角-175°、仰角-111°)
以上、いかがでしたでしょうか?はや2NOWから分かる「中利得アンテナの向き」は「ちょっと複雑」だけど「地味に面白い」と思って頂けたなら幸いです。ここまで読んで頂いた上で図2の数値を改めて見ていただくと、2021/08/30時点で「方位角」が-98.85°、「仰角」が0°ということで、ホーンをカプセル側付近の方向に目一杯浅く向けていることが読み取れます(前述の例2に近いです)。これ実は、軌道計画が算出するイオンエンジンによる加速姿勢の要求が厳しく、ホーンは地球方向を向けていません(笑)。ですが、あと数度の方向までホーンを向けることが出来ており、地球との電波通信回線を成立させることが出来ています(そういう姿勢で手を打ってもらえるように軌道計画チームと調整しています)。この様に、はや2NOWの表示から「中利得アンテナ」の向きを読むことで、ぜひ探査機から見て地球がどの方向にあるかイメージしてみて下さい。
はやぶさ2プロジェクト Yuto Takei
2021.09.03