
これまで、「はやぶさ2」の運用は順調に行われてきました。「はやぶさ」では実現できなかった小型ローバを小惑星リュウグウに着陸させることにも成功しました。そして、もう1つ「はやぶさ」で想定通りには実現できなかったことであるタッチダウンに、2019年2月22日に挑戦することになります。
当初の予定では、タッチダウンは去年(2018年)の10月下旬に行う予定でした。しかし、リュウグウの表面には至る所にボルダー(岩塊)があり、平らで広い場所はありませんでした。リュウグウ到着前には、直径100mくらいの円の平らな領域があるだろうと想定していたのですが、100mどころか2、30mの平らな場所すら見当たりません。
タッチダウンを予定していた去年の10月下旬には、タッチダウンは行わずに、ターゲットマーカを着地予定地点付近に降ろす運用を行いました。ターゲットマーカはほぼ予定の場所に降ろすことができ、その後、ターゲットマーカの着地点付近を詳しく調べました。そして、最終的にL08-E1と呼ばれる領域がタッチダウンを行う場所として決定されました。L08-E1については後述しますが(図11参照)、最終的にタッチダウンを行う領域はL08-E1の中の半径3mの円の中となりました。その領域を図1に示します。
-
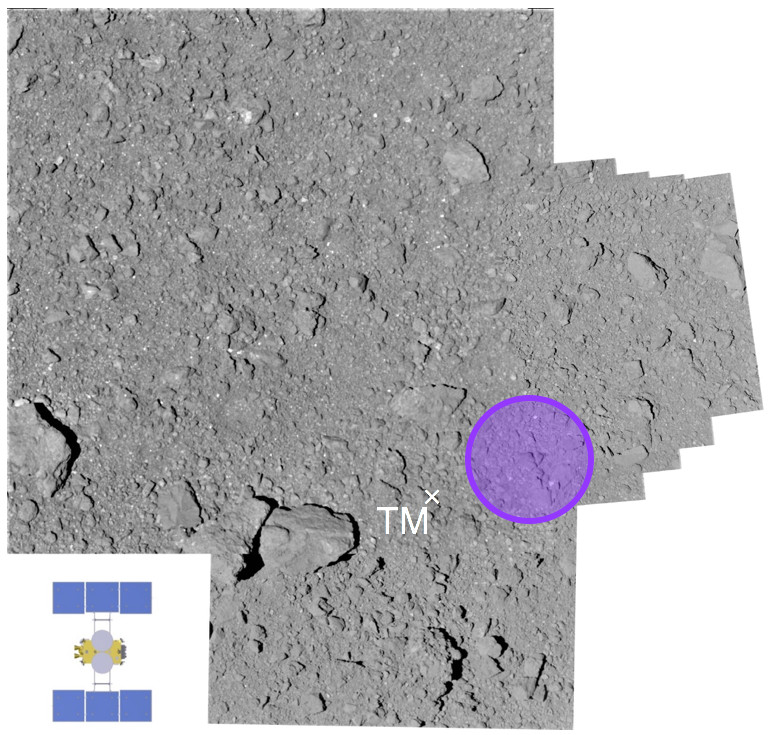
[別ウィンドウで開く] 図1:タッチダウンを行う場所。
タッチダウンは紫の円(直径約6m)の中を狙う。×印は、ターゲットマーカが着地している位置を示す。左下の探査機のイラストは写真と同じスケールで描いたものである。(画像クレジット※:JAXA)
タッチダウンでは、図1に示した円の中心を目指して探査機が降下します。ここは、ターゲットマーカの位置から4、5m離れた位置になります。探査機の誘導誤差は最大でも2.7mと見積もられていますので、この半径3mの円の中に探査機を着地させることができることになります。サイズ的にはギリギリですが、ここにタッチダウンすることに挑戦します。
図1に示した領域をDEM(Digital Elevation Map)によって三次元(3D)で示した動画を図2に示します。タッチダウンの場所の周辺がデコボコしている様子が分かります。
-
図2:タッチダウン地点付近の様子。
DEM(Digital Elevation Map)を作成し、動画にしたもの。(画像クレジット:JAXA)
リュウグウ到着前には幅100mくらいの平らなところにタッチダウンするつもりでしたが、最終的には直径6m(半径3m)の円の中を狙うことになりました。ここまで精度を上げることができたのは、あらかじめピンポイント・タッチダウンという手法も検討していたからです。ただ、ピンポイント・タッチダウンは、衝突装置によって人工的なクレーターを作って、そのクレーター周辺へのタッチダウンの時に用いる予定でした。実際にはこのピンポイント・タッチダウンを最初からやらざるを得なくなったわけです。
タッチダウン地点決定への経緯
ここでは、タッチダウンの地点が図1に絞り込まれるまでの経緯をまとめてみました。以下は少し長くなるので、御用とお急ぎでない方のみ・・・
「はやぶさ2」が小惑星リュウグウに到着したのは、去年(2018年)の6月27日。その後、リュウグウの観測を精力的に行い、8月には、探査機、MINERVA-II1、MASCOTの着地点の選定作業を行いました。
1. タッチダウンを行うことができる場所の条件
探査機がタッチダウンできる場所としては、以下の(A)から(E)までの条件を満たしている必要があります。(これは、リュウグウ到着前に想定していた条件です。)
(A) 緯度が±30度程度の範囲であること
「はやぶさ2」は地球とリュウグウを結ぶ直線に沿って降下/上昇を行うのが基本です(図3)。これは、「はやぶさ2」がリュウグウを探査する期間は、「はやぶさ2」から見て地球と太陽が同じような方向にあり、探査機の太陽電池やアンテナを地球や太陽方向に向けておく必要があるからです。タッチダウンするときには、探査機は太陽電池のパドルをリュウグウの表面に平行になるように姿勢を変更しますが、姿勢を変更したとしても太陽電池には太陽の光がきちんと当たっている必要があります。探査機が降下していく姿勢とタッチダウン時の姿勢とがあまり変わらないようにするためには、タッチダウンをする緯度は±30度程度の範囲となります。
-
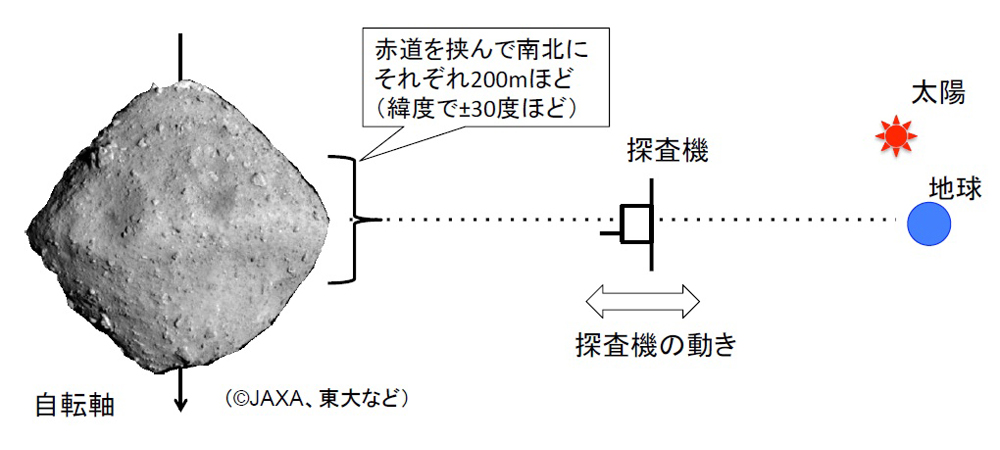
[別ウィンドウで開く] 図3:リュウグウに対する探査機の動きとタッチダウンに適した緯度の範囲。(画像クレジット※:JAXA)
(B) 表面の傾きが平均して30度以内であること
上述のように「はやぶさ2」は、太陽電池パドルがリュウグウ表面と平行になる姿勢でタッチダウンします。タッチダウンする場所が部分的に傾いているとやはり探査機の姿勢も傾けることになります。このときに傾きが大きくなると太陽電池に当たる太陽光が弱くなってしまうため、表面の傾きは30度以内であることが条件になります。
(C) 直径100m程度の平坦な部分があること(注*1)
探査機を自律降下させるときの航法誘導の精度は、およそ±50m程度と見積もられています。このため、安全にタッチダウンを行うには直径100mくらいの平らな場所が必要になります。
(D) 岩塊(ボルダー)が高さ50cm以下であること(注*2)
サンプルを採取するサンプラホーンは、約100cmの長さを持っています。そのため、サンプラホーンの先端が接地したときに機体が岩塊と接触しないためには、岩塊の高さは50cm以下であることが望ましいということになります。
(E) 表面温度が97℃(絶対温度 370K)以下であること
探査機に搭載されている機器が地表の熱で高温になり過ぎて故障するのを防ぐため、タッチダウン地点はこれより低い温度である必要があります。
これまでの運用で得られたデータをもとにして、以上(A)から(E)までの前提条件を満たす場所をピックアップし、タッチダウン候補地点として絞り込んでいきました。
- (注*1)当初は、航法誘導の精度は±50m程度と想定していたため、幅100mくらいの平らな場所にタッチダウンする予定でした。
- (注*2)この条件は、2018年8月の時点で設定していたものです。その後の検討では条件を少し緩和して「岩塊(ボルダー)が高さ70cm以下であること」としています。
2. タッチダウン候補地の最初の絞り込み
候補地点の絞り込みは次の3段階で行われました。
第1段階:安全度の解析
リュウグウの形状モデルから、各場所での太陽の角度や表面の傾き、凹凸などを総合的に評価して「安全度スコア」を求めました(図4)。このスコアで見ると、おおよそリュウグウの赤道リッジ(尾根)に沿った場所が安全度が高いことが分かります。
-
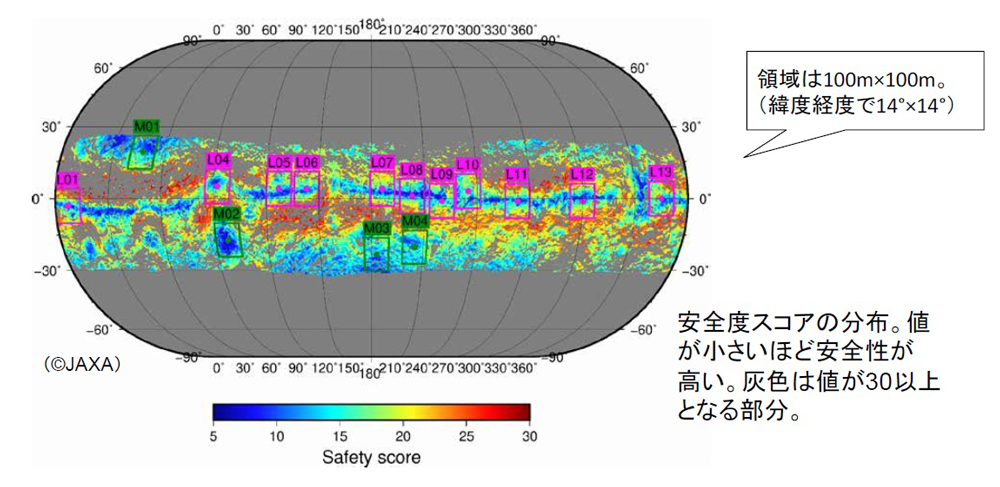
[別ウィンドウで開く] 図4:形状モデルから導いたタッチダウンの安全度スコアの分布。(画像クレジット:JAXA)
このスコアに基づいて、安全度が高い場所として幅100mの候補地点を低緯度地域から11か所、中緯度地域から4か所選びました。「L・・」が低緯度、「M・・」が中緯度の候補地点を表します。
第2段階:画像による評価
続いて、これまでに撮影された光学航法カメラの画像を使って、岩塊の数や平坦さの度合、東側に障害物があるかどうかといった観点から、候補地点の評価を行いました。(自転するリュウグウに降下するということは、着地する表面から見ると東から探査機が接近することになります。このため、候補地点の東側に大きな岩のような障害物があると、降下する探査機とぶつかる危険があります。)
これにより、候補地点を低緯度地域で4か所(L05, L07, L08, L12)、中緯度地域で3か所(M01, M03, M04)に絞り込みました(図5)。
-
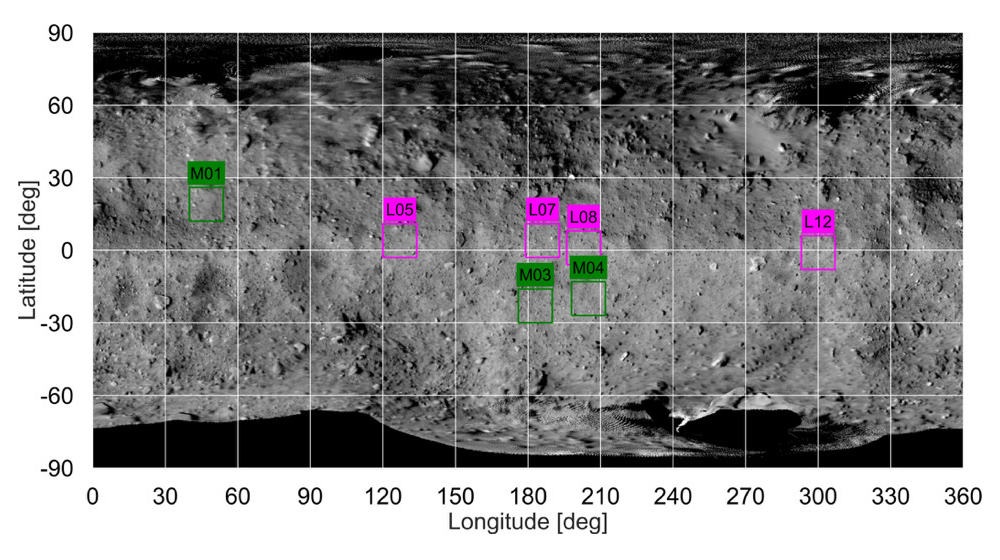
[別ウィンドウで開く] 図5:画像評価によって絞り込まれた7か所のタッチダウン候補地点。(画像クレジット※:JAXA)
第3段階:実現性の解析
ここまでで7か所に絞られた候補地点について、さらにタッチダウン実現に必要な条件を満たすかどうかを検討しました。
表面温度については、7か所すべてが条件を満たしていました。また、地上局との通信が途絶えないかといった点についても、7か所とも問題はありませんでした。
さらに、各地点の岩塊の個数密度についても調べました。リュウグウの表面はかなり岩が多いため、最終的にタッチダウン候補地点を決めるに当たっては、この条件が最も重要なポイントとなります。
これまでに得られた画像から、7か所の候補地点それぞれについてエリア内にある岩塊のマップを作成しました(図6)。
-
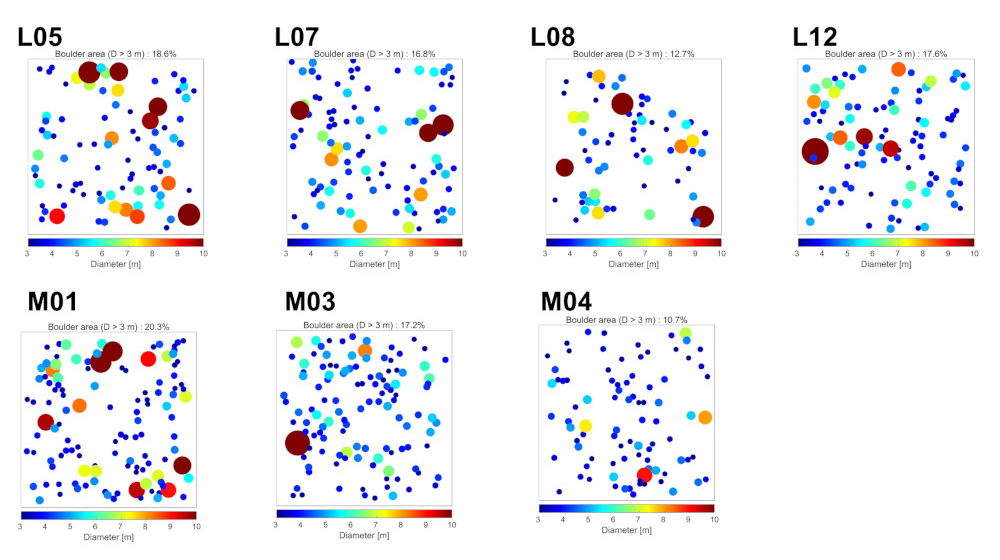
[別ウィンドウで開く] 図6:ボルダー(岩塊)マップ。
直径3m以上の岩塊の分布を画像から読み取りマップを作成した。色別で大きさを示してあり、茶色は10m以上のものを示す。(画像クレジット:JAXA)
これを使って、岩塊がエリア内を覆う割合がなるべく少ない地点をピックアップし、最終的に「L08」という地点をタッチダウン候補地点とし、バックアップとして「L07」「M04」の2地点を選びました(図7)。
-
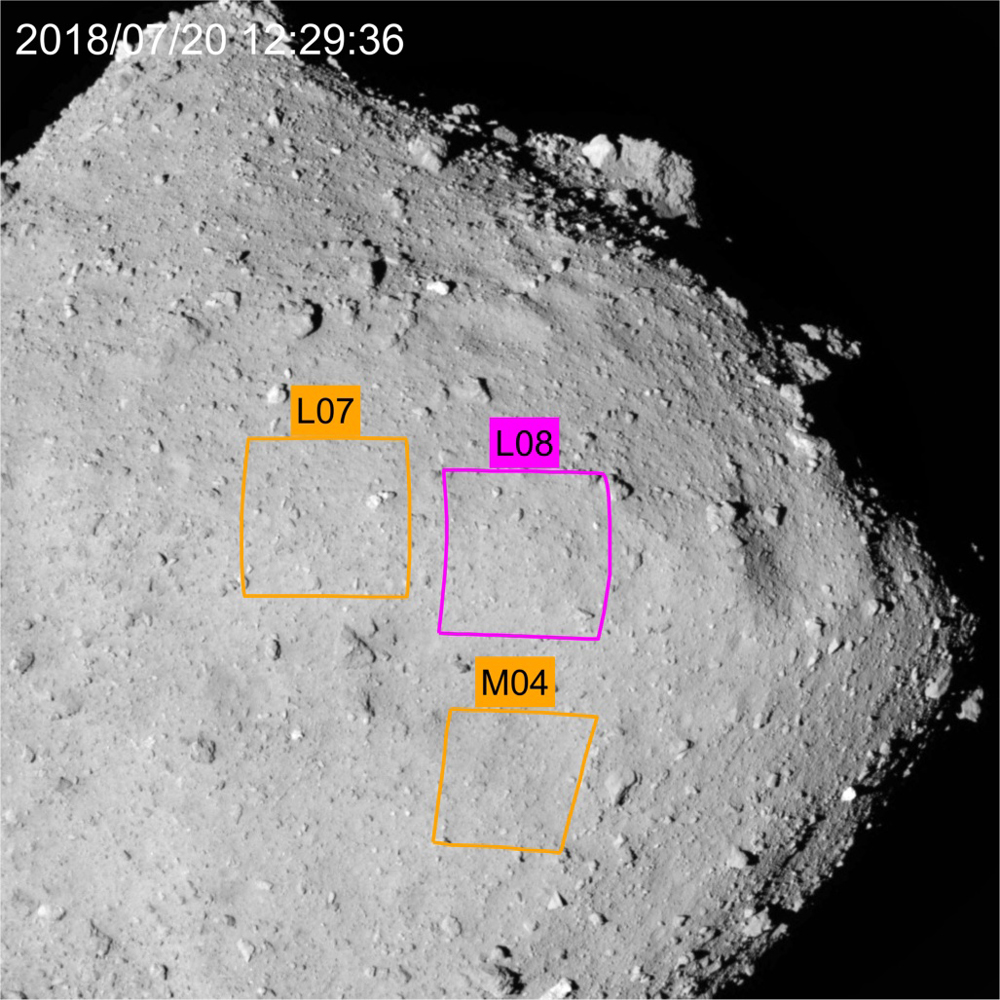
[別ウィンドウで開く] 図7:最終的に決定されたタッチダウン候補地点「L08」とバックアップの候補地点「L07」、「M04」。(画像クレジット※:JAXA)
並行して、これまでに科学観測で得られたデータを使い、「科学的成果を期待できるようなサンプルを採取できる場所か」「岩塊の量から判断して安全度に差があるか」「サンプルの収量は十分に多くなるか」といった点もチェックされました。
その結果、リュウグウ表面の物質はどこでもおおよそ同じような多様性を持っていることがわかり、表面にある粒子サイズから見積もったサンプルの収量もあまり変わらないことがわかりました。よって、科学的評価の面からも、「L08」をメインの候補地点とし、バックアップを「L07」「M04」の2地点とするという結論になりました。
ここまでの議論が、2018年8月に行われたことです。なお、ここでは省きましたが、MINERVA-II1やMASCOTの着地点についても議論がなされ、最終的に図8のように決まりました。
-
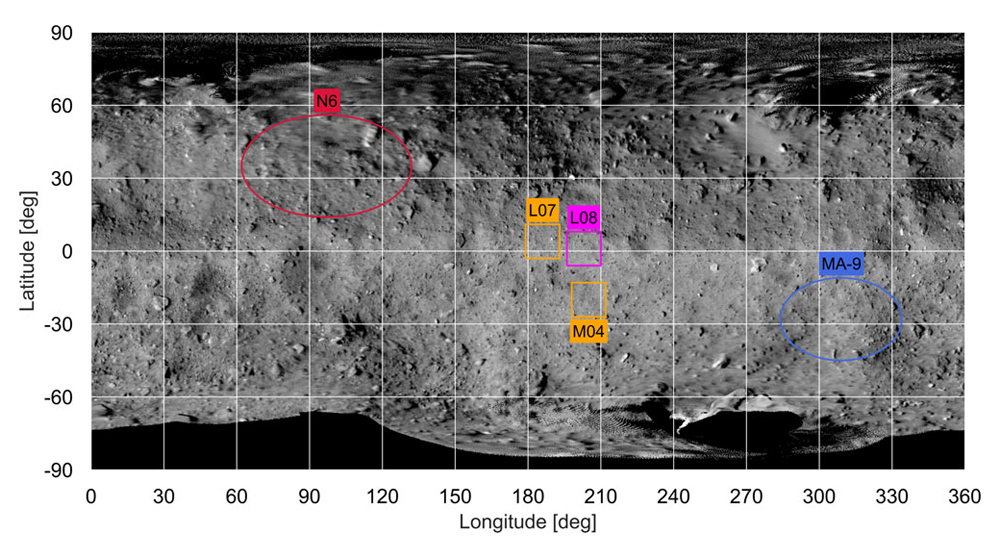
[別ウィンドウで開く] 図8:タッチダウン候補地点(L08, L07, M04)、MINERVA-II1の着地候補地点(N6)、MASCOTの着地候補地点(MA-9)。(画像クレジット※:JAXA)
3. タッチダウン候補地の次の絞り込み
2018年9月からは、タッチダウンのリハーサル運用や、MINERVA-II1やMASCOT分離運用のために、「はやぶさ2」をリュウグウ表面近くまで降下させる運用を行いました。そのときに、タッチダウン候補地点L08について近づいて詳しく調べました。その結果、L08領域もかなりの部分はボルダーが分布しておりタッチダウンが難しいことが分かりました。ただし、L08の中にボルダーが少なそうな領域がいくつかあり、そのうち最もタッチダウンについて条件がよさそうなところをL08-Bと名付けました。L08-Bを図9に示します。さらに、L08-Bの周りを撮影した画像を図10に示します。
-
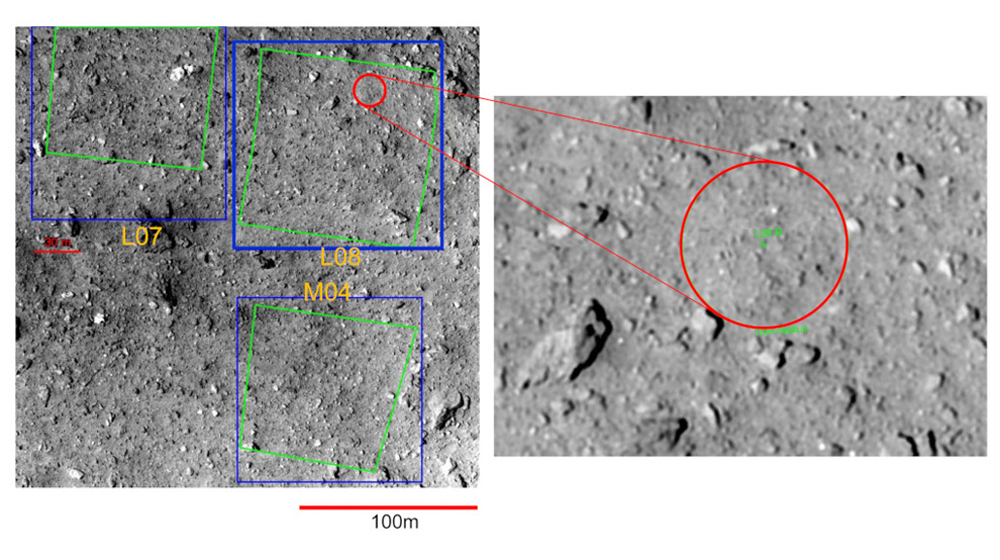
[別ウィンドウで開く] 図9:赤い丸がタッチダウン候補地点L08の中のL08-B。赤い丸の直径は約20m。(画像クレジット※:JAXA)
-

[別ウィンドウで開く] 図10:L08-Bの周りの様子。
赤い丸がL08-B。画像は、2018年10月3日に高度約1.9kmから望遠の光学航法カメラ(ONC-T)で撮影。(画像クレジット※:JAXA)
2018年10月25日にタッチダウンリハーサルとして、ターゲットマーカをL08-Bに降下させる運用を行いました。その結果、ターゲットマーカは、L08-Bから5mほど外側に着地したのです。そこで、さらにターゲットマーカ付近を詳しく調べました。そして、タッチダウンの可能性がある場所として、L08-B1とL08-E1の2つまで絞り込んだわけです(図11)。
-
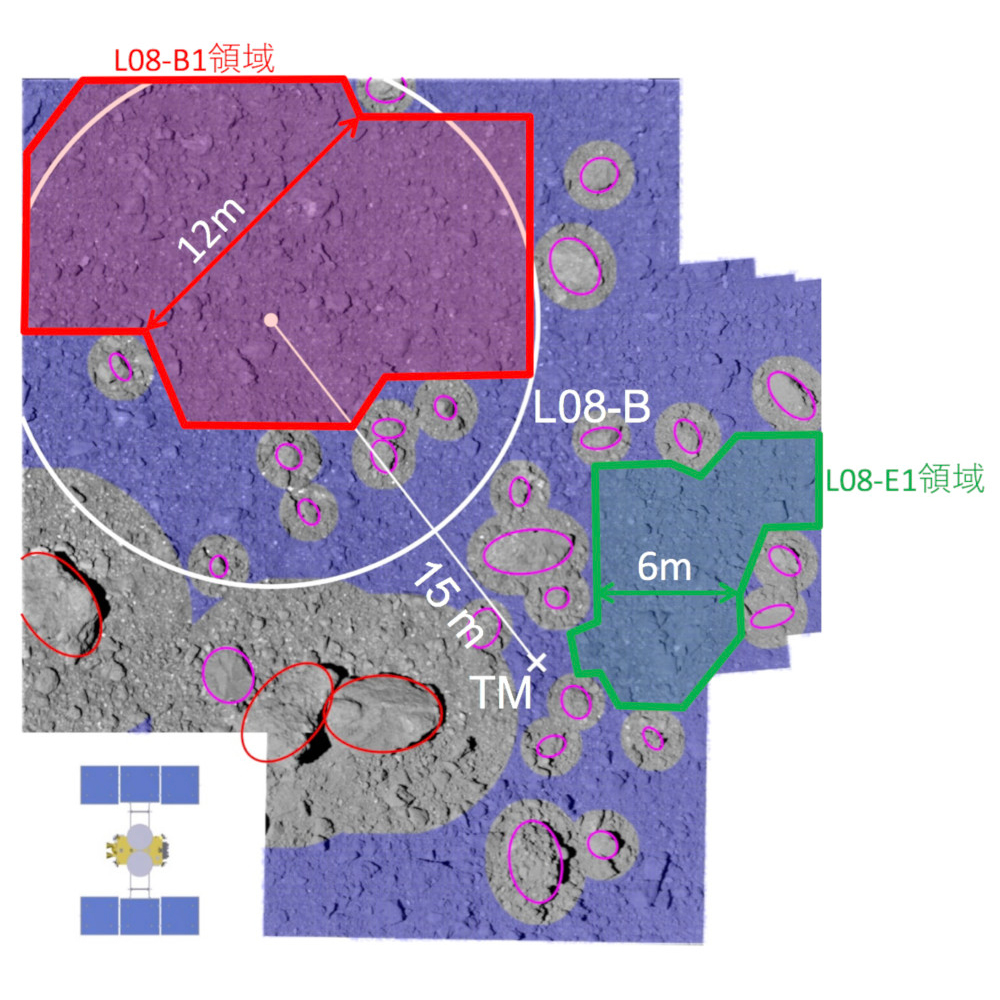
[別ウィンドウで開く] 図11:タッチダウン候補地点L08-B1(赤)とL08-E1(緑)。白の円がL08-Bの領域を示す。また×印がターゲットマーカが着地している場所である。(画像クレジット※:JAXA)
なお、ターゲットマーカを降下させる運用で、「はやぶさ2」の航法誘導の精度は±15mくらいであることが確認できました。当初は±50mと想定していたので、これに比べれば遙かによい精度を達成できたことになります。しかし、±15mの精度の場合、幅30m以上の平らな領域が必要になります。ところが、そのような領域は見当たりません。そこで、すでに降ろしてあるターゲットマーカを利用したタッチダウンの手法をとることにしました。これがピンポイント・タッチダウンとなります。ピンポイント・タッチダウンの手法を用いると、より高精度で探査機を誘導することができるのです。
図11では、大きなボルダーについてはその大きさや高さも推定し、探査機がタッチダウンしても安全な場所を調べました。図11において青色に染めてある領域にサンプラホーンが接地すれば探査機は安全です。このようにして、ターゲットマーカの近くでは、L08-B1とL08-E1が着地場所として絞り込まれたわけです。
ターゲットマーカから少し遠いけれども幅12mくらいのL08-B1がよいのか、ターゲットマーカの近くだけれども幅6mと狭いL08-E1がよいのか、探査機の航法誘導の精度の観点から詳しく検討し、最終的には最初に図1で示したL08-E1にタッチダウンすることに決まりました。最初にも述べましたように、最終的な航法誘導の精度は±2.7mになりました。この精度でL08-E1の中の直径6mの円内を狙うことになります(図1)
以上で、タッチダウン候補地決定の長いお話は終わりです。
※これらの画像の背景にあるリュウグウの画像については、クレジットはJAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研となります。
はやぶさ2プロジェクト
2018.02.20