
タッチダウン・リハーサルの3回目を10月23日から25日にかけて行います。今回のリハーサルの目的は、近距離での高度計測を行うLRF(レーザ・レンジ・ファインダ)による計測値を探査機の制御にフィードバックすることです。そして、条件が満たされれば、ターゲットマーカ(TM)の分離も行い、切り離したTMの追跡も試みます。これらのことを行うことで、約20mという低高度での航法誘導制御の精度を確認します。
TD1-R3運用の主要なスケジュール
| 時刻 UTC (世界時) |
時刻 JST (日本時間) |
探査機速度 cm/s |
HP高度 m | 直下点高度 m | 事項 |
|---|---|---|---|---|---|
| 10/22 23:30 | 10/23 08:30 | 0 | 20,000 | 臼田局開始 | |
| 10/23 08:20 | 10/23 17:20 | マドリッド局開始 | |||
| 10/23 16:00 | 10/24 01:00 | ゴールドストーン局開始 | |||
| 10/23 23:00 | 10/24 08:00 | 臼田局開始 | |||
| 10/23 23:40 | 10/24 08:40 | 降下前準備開始 | |||
| 10/24 03:40 | 10/24 12:40 | -40 | 20,000 | 降下開始 | |
| 10/24 06:40 | 10/24 15:40 | キャンベラ局開始 | |||
| 10/24 08:20 | 10/24 17:20 | マドリッド局開始 | |||
| 10/24 08:30 | 10/24 17:30 | 13,000 | |||
| 10/24 14:00 | 10/24 23:00 | -10 | 5,000 | 降下減速ΔV | |
| 10/24 16:10 | 10/25 01:10 | ゴールドストーン局開始 | |||
| 10/24 22:40 | 10/25 07:40 | 1,500 | |||
| 10/24 23:00 | 10/25 08:00 | 臼田局開始 | |||
| 10/25 01:20 | 10/25 10:20 | 500 | |||
| 10/25 02:00 | 10/25 11:00 | 250 | |||
| 10/25 02:30 | 10/25 11:30 | 0 | 20 | TM投下 | |
| 10/25 02:50 | 10/25 11:50 | 50 | 20 | 離脱上昇ΔV | |
| 10/25 03:20 | 10/25 12:20 | 900 | |||
| 10/25 04:10 | 10/25 13:10 | 2,600 | |||
| 10/25 06:40 | 10/25 15:40 | キャンベラ局開始 | |||
| 10/25 08:20 | 10/25 17:20 | マドリッド局開始 |
- 時刻:おおよその予定時刻(10分刻み)を示す。運用の都合により変更になる可能性がある。 探査機に関する時刻は機上時刻となるので、その確認は電波伝搬時間の約18分後になる。
- 探査機速度:小惑星に相対的な速度(小惑星に接近する方がマイナス、遠ざかる方向がプラス)。速度制御を行った時のみ数値を示す。速度制御の後は、リュウグウ等の引力の元で速度が変化する。
- HP高度 :リュウグウ中心からの距離。
- 直下点高度:リュウグウ表面からの高さ。
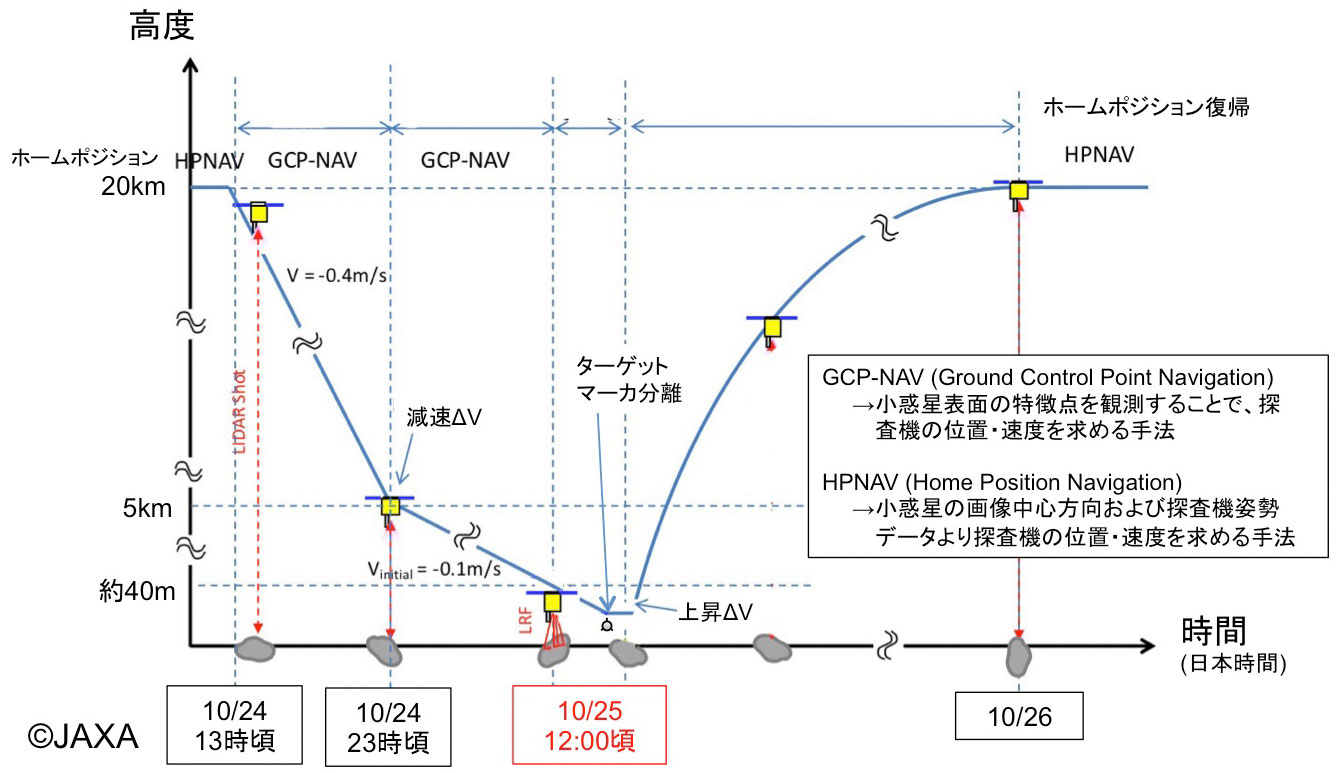
TD1-R3運用の模式図
-
 [別ウィンドウで開く]
図1 TD1-R3運用の模式図
[別ウィンドウで開く]
図1 TD1-R3運用の模式図
TD1-R3運用の低高度シーケンス
-
 [別ウィンドウで開く]
図2 TD1-R3運用の低高度シーケンス
[別ウィンドウで開く]
図2 TD1-R3運用の低高度シーケンス
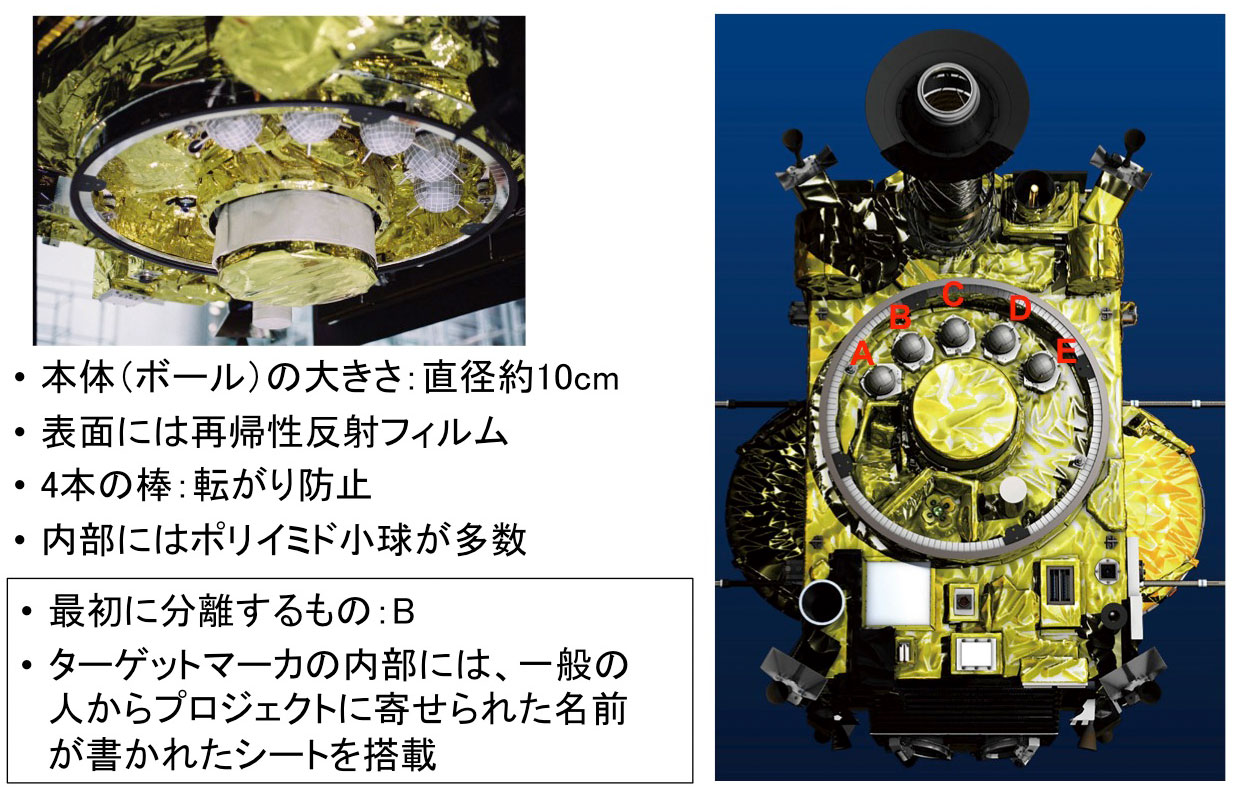
参考:ターゲットマーカ(TM)について
-
 [別ウィンドウで開く]
図3 参考:ターゲットマーカ(TM)について
[別ウィンドウで開く]
図3 参考:ターゲットマーカ(TM)について
はやぶさ2プロジェクト
2018.10.24