
LIDAR光リンク実験顛末記
「はやぶさ2」に搭載されているリモセン機器(遠くから観測する装置)を,観測範囲に着目して分類すると,大きくふたつに分けられます。対象の一点を観測するNIRS3とLIDAR,それに対して対象を面的にとらえるONCとTIRです。ONCとTIRは,目標天体リュウグウが映ってさえいれば,リュウグウとの位置関係を直接読み解くことができます。これに対して,NIRS3やLIDARが取得するデータはある領域についてのもので,それだけではリュウグウのどこのデータなのかがわかりません。このため,観測時に探査機がどの方角を向いていたのか(星の見え方から求めます),探査機について装置がどの方角を向いているのかをもとに,観測地点を推定します。装置が向いている方向は,もちろん,打ち上げ前に確認するのですが,打ち上げの振動などによってわずかに変化する可能性も否定できません。リュウグウ到着後は20kmもの距離から観測を行うわけですから,方向のずれがわずかでも,見ている領域が大きくずれてしまいます。
NIRS3はリュウグウが散乱した太陽光のエネルギー分布を計測する装置で,精度を挙げるために長時間の積分が可能です。このため,明るい恒星ならば,積分時間を稼ぐことで検知可能です。NIRS3で恒星を観測することで,探査機の向いている方向と装置が向いている方向の関係が求まります。これに対してLIDARは,強く短い光(パルス)の到着時間を測定するための装置のため,積分時間を稼ぐことができません。LIDARを明るい恒星に向けても検知できないのです。
LIDARチームは,スイングバイのために「はやぶさ2」が地球に近づく事を利用して,装置が向いている方向を確認する観測を行いました。地球から「はやぶさ2」に向かってレーザパルスをうち,それをLIDARで検出する,というものです。地上施設から撃ったレーザパルスは地球からの距離に 応じて広がり,「はやぶさ2」の位置に届くころには弱くなってしまっていますが,LIDARが検知できる程度の強度はあるだろう,という見込みでした。 10月,11月には東京・小金井市にある国立研究開発法人情報通信研究機構の敷地からレーザを発射することを試みたのですが,あいにく天候に恵まれず,レーザは雲に遮られてしまいました。12月,「はやぶさ2」は南半球からしか見えないためオーストラリア,キャンベラにあるストロムロ山天文台に協力していただいて,実験を行うことができました。
-
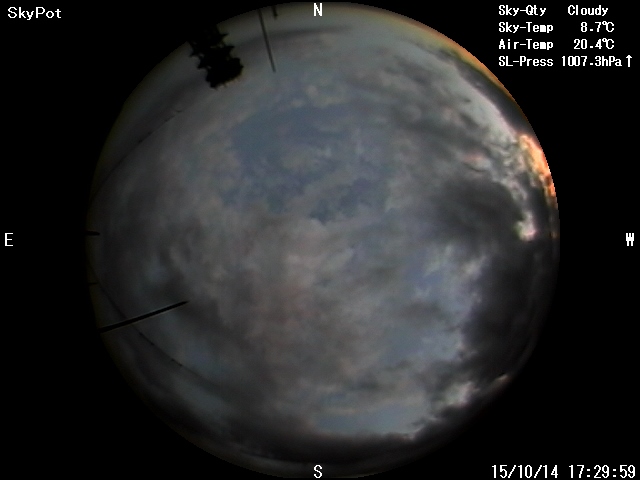 図1 観測時(10月14日)の空の様子。一部晴れているように見えるが,「はやぶさ2」は右側の厚い雲の向こうにいる(図:NICT提供)。/span>
図1 観測時(10月14日)の空の様子。一部晴れているように見えるが,「はやぶさ2」は右側の厚い雲の向こうにいる(図:NICT提供)。/span>
-
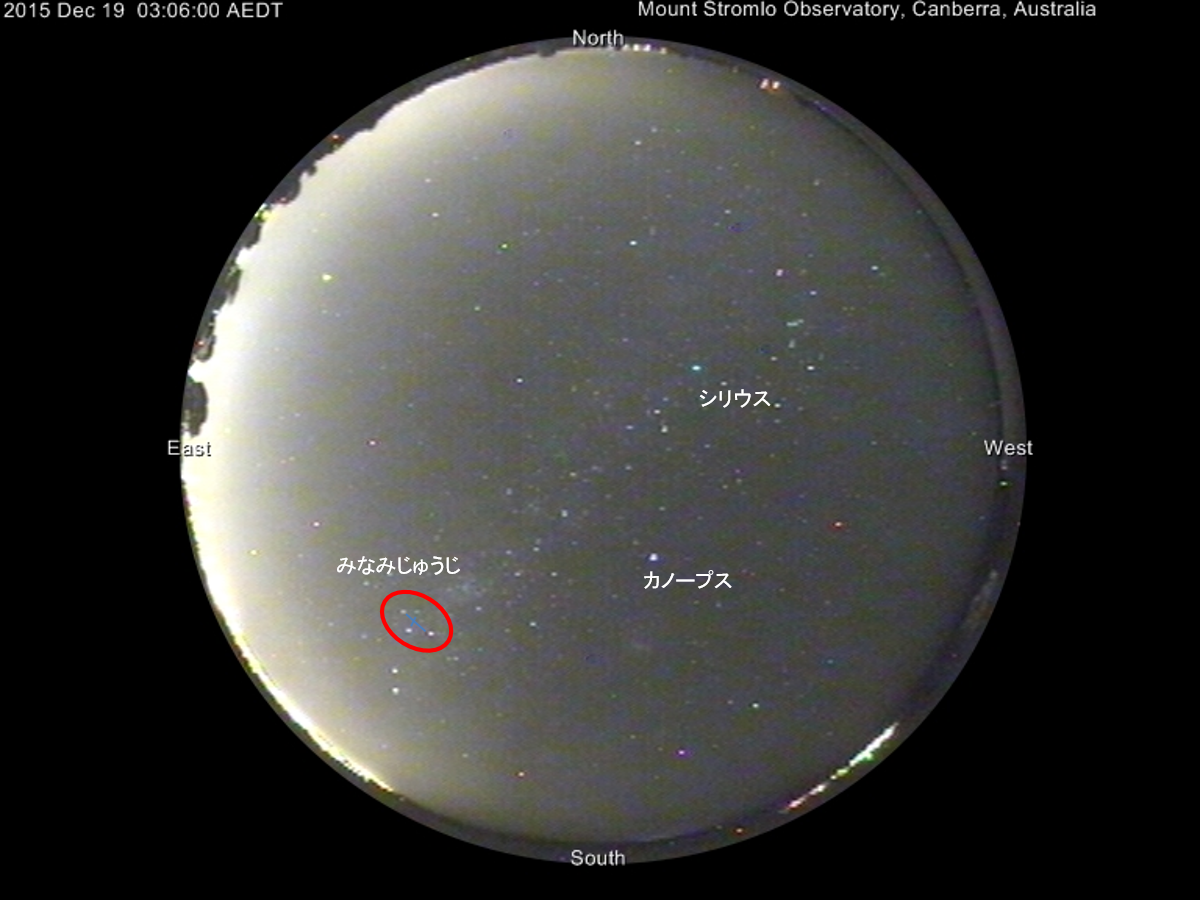 図2 オーストラリアからの観測時(12月19日)の空の様子。空はクリアで,多くの星が見えている。「はやぶさ2」は左下のみなみじゅうじ座のあたりにいる(図:ストロムロ天文台提供)
図2 オーストラリアからの観測時(12月19日)の空の様子。空はクリアで,多くの星が見えている。「はやぶさ2」は左下のみなみじゅうじ座のあたりにいる(図:ストロムロ天文台提供)
12月のオーストラリアは夏。空の条件は申し分ないものでした。地上から見た探査機の位置はよくわかっているのに対して,探査機に搭載されたLIDARの向きに不確定性があるということで,地上からは「はやぶさ2」がいると思しき方向にパルスレーザを撃ち続け,一方「はやぶさ2」は渦巻き状に姿勢を変えてゆく,という作戦です。1回の実験で割り当てられた時間は2時間。この間に「はやぶさ2」は158通りの姿勢を試します。 打ち上げ前に測定されたLIDARの方向を中心として内側から外側に,渦巻き状に姿勢を変えます。
ちなみに,158通りの姿勢を試すという事は,そのためのコマンドは500行以上になります。さらに,毎日天気が 良いとは限らないので,2日目の運用計画は1日目が晴れた場合と悪天候だった場合のそれぞれについて作っておかなければなりません(地球は,ゆっくりとは いえ太陽のまわりを運動しているため,計画の流用はできないのです)。3日目の運用計画は3種類,4日目の運用計画は4種類作らなければならないので,4日間で10通りの手順書が必要になってしまいます。似たようなコマンドを,数字を少しずつ変えながら作らなくてはならないため,姿勢系・計画系の方々には大変お世話になりました。
打ち上げ前に測定されたLIDARの向きから始めて,内側 から外側にむけて渦巻きを作ってゆくので,早いうちに地球からの光を検知できるものと思っていました。しかし1周,2周,3周しても兆候が見られません。とうとう3日分,およそ450通りの姿勢を試しても確証が得られませんでした。チーム内の雰囲気の暗さは言うまでもありません。ステータスは送られてくるので装置が壊れたわけではなさそうだ。もしかして打ち上げの時にカバーを外し忘れたのではないか,という冗談のような話まで真剣に検討しましたが,打ち上げ直前の「はやぶさ2」の写真にはカバーは映っていませんでした。
データの中には,時々ノイズが含まれます。あとからこの「ノイズ」の発生頻度を調べてみると,実は「はやぶさ2」が(つまりそこについているLIDARが)特定の方向に向いている時だけ高くなっていました。 データの傾向が,予想していたものと違っていたためにノイズだと思い込んでいたのでした。もしかするとLIDARはちゃんと反応していたのかもしれない。文字通り,チーム内に少し光が射しました。12月16日のことです。
-
 図3 LIDARが「ノイズ」を検知する割合をカラーマップにしたもの。特定の方向を向いたときに発生頻度が高くなっている。
図3 LIDARが「ノイズ」を検知する割合をカラーマップにしたもの。特定の方向を向いたときに発生頻度が高くなっている。
オーストラリアは南半球にあるため12月は初夏にあたるのですが,クリスマスはお祝いします。ストロムロ山天文台の熟練したスタッフもクリスマス休暇を取るため,12月の後半は別のスタッフが天文台を操作することになっていました。しかし彼はこの図を見て,休暇を取り消して最後まで観測に付き合うことにしてくれたのです。アレックス,ありがとう。12月18日からの観測では,光を受けたタイミングだけでなく,受けた光のエネルギーの計測を行う事にしました。すると,LIDARは確かに「はやぶさ2」が特定の方向を向くタイミングで,地球からのパルスを検知していたのです。
-
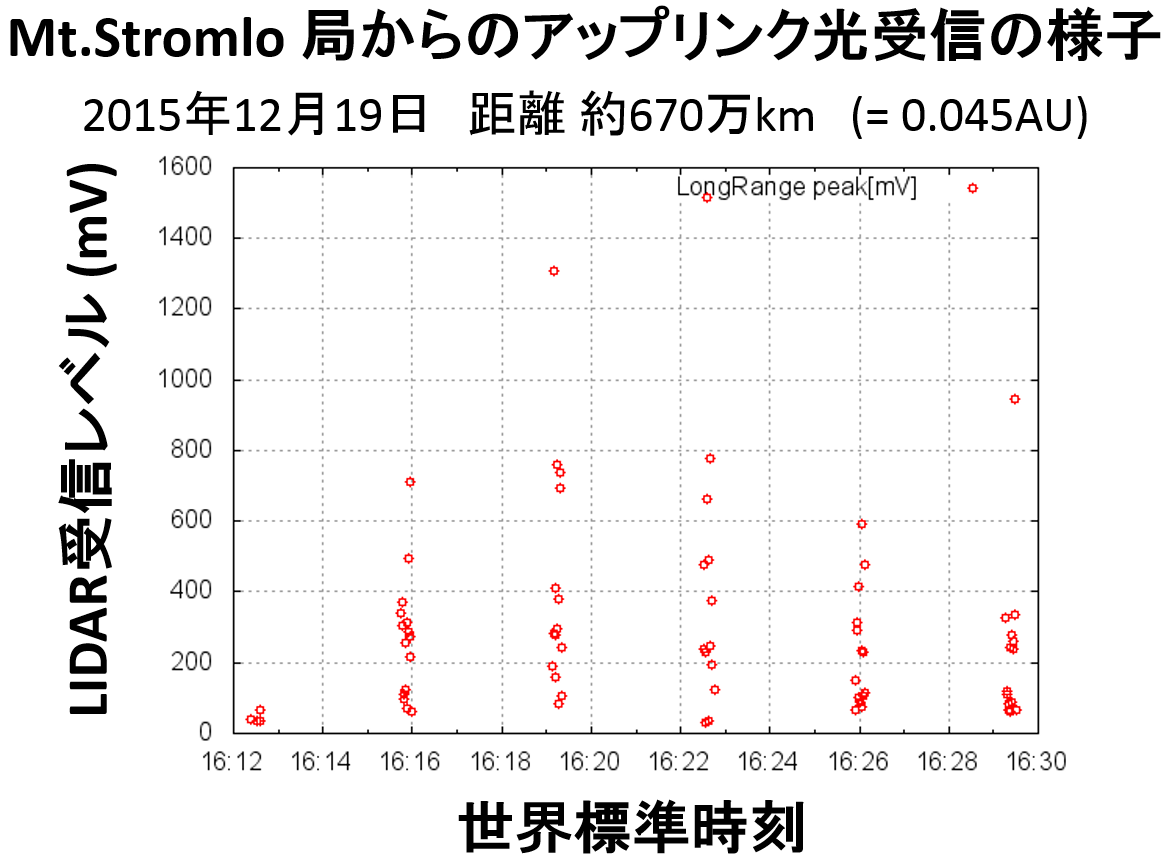 図4 地上からの光を受けて,LIDARが出力した信号電圧。光は周期的に検知されている。
図4 地上からの光を受けて,LIDARが出力した信号電圧。光は周期的に検知されている。
こうして求められたLIDARの方向は,地上で計測されたものと完全には合致していませんが,ずれは予想された範囲内で,最初の60通りの姿勢の中に含まれていました。結局,LIDARが向いている方向が確認できたのは割り当てられていた観測日の最後から2日目(最終日は雨だったため,実質上最終日!)になってしまいました。LIDARはレーザを散乱してくれるターゲットがないと測定ができないため,リュウグウに到着するまで暫くお休みです。 到着後は,リュウグウの間の距離を継続的に計測することで「はやぶさ2」の軌道の決定に貢献したり,リュウグウの表面形状や反射率の分布からリュウグウがどのような天体なのかを明らかにしてゆきます。
はやぶさ2プロジェクト H. S.
2016.03.18