
★第4拡張★ はやぶさ2の隠れ機能?#1
皆さんこんにちは!なかなか良いペースで第4拡張です!
なぜ急にペースが上がったのかって??実は、意外にもこの日誌を楽しみにしてくださっている方がいらっしゃることが、特別公開やX(旧Twitter)等の反応から明らかになってきたのです。
もしかすると、あなたのその応援メッセージの一言が、筆者を、ひいては、はやぶさ2関係者の心を奮い立たせているかもしれません!是非、引き続き、応援のほど、よろしくお願い致します。
今回は、はやぶさ2の隠れ機能(?)という気になるワードについて、深掘りしていきたいと思います。この話をするに当たって、まず欠かせないのが、「セーフホールドモード」という機能についてです。「ああ、あれのことね」と思ったそこのあなた!相当通ですね(ニヤリ)
セーフホールドモードとは、宇宙機に異常が起こった際、宇宙機が安全に最低限の運用を継続するために遷移する制御モードです。一般的に、どのような衛星・探査機にも、このセーフホールドモードのような制御モードが備わっています。
一方で、このモードでどのような制御をするかは宇宙機によって異なります。
はやぶさ2では、例えば、リアクションホイールやスタートラッカーという姿勢制御系の機器が異常になり、探査機姿勢が正常に維持できなくなってしまったような場合、姿勢異常を検知し、このセーフホールドモードに遷移します。
このモードでは太陽センサ(CSAS)の太陽角をフィードバックして+Z軸方向を太陽指向させながらRCSを使った力ずくの制御を行い、
最終的には機体をスピンさせて、パッシブに安定なスピン姿勢を維持する形になります。このような最後の砦となる制御モードがあるので、我々も安心して普段の運用が行えているのです。
そんなRCSを使ったセーフホールドモードをRSH(RCS Safe Hold)と略称で呼んでいますが、実は、『WSH』という別のモードが存在します。何の略称か分かりますか?もったいぶらずに答えを書くと『Wheel Safe Hold』です。RCSではなく、Wheel=リアクションホイールを使ったセーフホールドモードなんですね!
はやぶさ2は普段からX、Y、Z軸周りのRWを3台使用して、慣性座標系に対して与えた目標の姿勢を維持するように三軸制御しています(この時、スタートラッカーとジャイロセンサから求めた姿勢をフィードバックしています)。WSHモードでも、RWを3台使用して制御するところは同じですが、慣性座標系に対して姿勢を維持するのではなく、
太陽センサーから得られる太陽方向の情報をフィードバックして、太陽指向する制御が行われます(角速度情報としてジャイロセンサーも使います)。つまり、特に目標とする指令を与えずとも、太陽センサーの情報を利用して、太陽方向を常に追尾するような三軸姿勢制御を行うモードと言えます。ちょっとした異常の場合であれば、
RCSを使わずに安定した姿勢制御が可能なWSHモードに入れて、自動的に太陽追尾させながら、良好な通信状態を確立しつつ、異常を解消するための時間的猶予を確保することもできます。
また、RCSを使用しないので、燃料節約にもなれば、探査機に余計な外乱を加えることもありません(良いことずくめ!)。
ただ、RCSに比べると、RWのトルクは弱いですし、最後の砦として頼るとするならば、、、と考えるとどうしてもRSHの方を選択してしまうのですね…。
そういった経緯もあり、実は打ち上げてこれまで、軌道上で実証する機会が無かったのですが、今回(2024年2月)、初めて機能を確認することができました!
図1は、RWを使った普段の三軸姿勢制御モードから、WSHモードに切り替わったタイミングの太陽角の時系列データを示しています。定常の制御モードでは、慣性系に対して姿勢を固定しているので、必ずしも太陽指向していませんが、WSHになった瞬間にきちんとX、Y軸周りの太陽角がゼロになり、
探査機姿勢が太陽方向に向けられ、安定した制御が行われていることが確認できます。
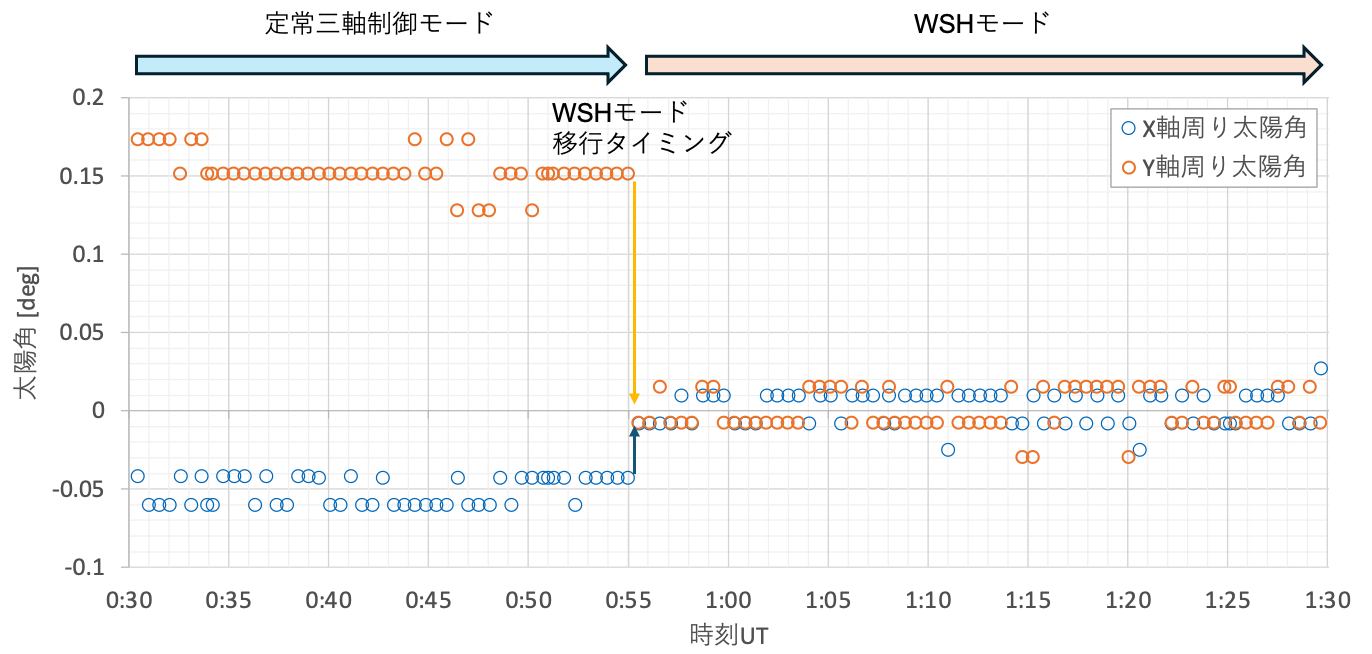
図1 WSHモード遷移時の太陽角の時系列データ
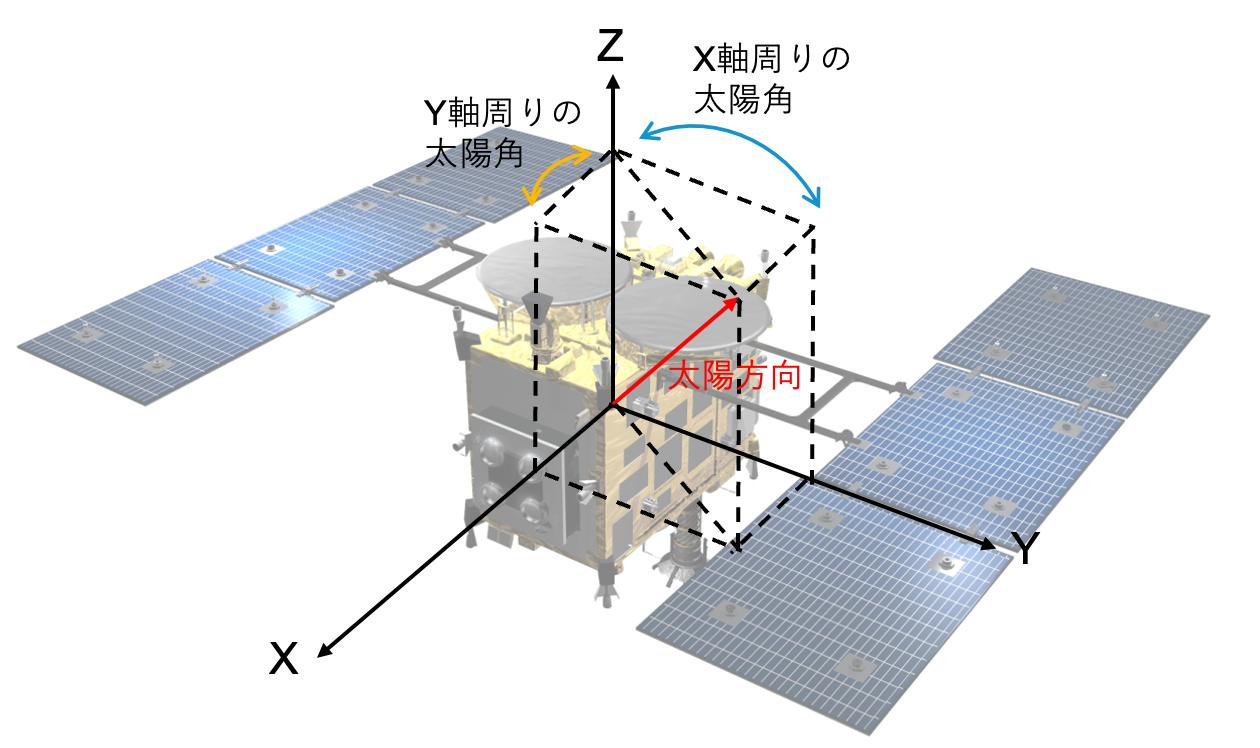
図2 太陽角定義
10年近い期間、隠れ機能として温められてきた機能がようやく日の目を見る瞬間が訪れ、関係者一同、感慨深い想いにふけりました。(꒪ˊ꒳ˋ꒪)ポワーン
さて、今回は、はやぶさ2でこれまで使用されていなかった、ホイールセーフホールドモード(WSH)についてご紹介しました。でも、なんで急に今まで使っていなかった制御モードの機能検証試験を行なったの?と思いましたか?思いましたよね!?
その理由は………、、、
次回のお楽しみです!(笑)
2024.2.29 三桝裕也