
この記事は、2018年10月12日に、ドイツ航空宇宙センター(DLR)によってプレスリリースされました記事
Numerous boulders, many rocks, no dust: MASCOT's zigzag course across the asteroid Ryugu
を和訳したものです。
関連する記事として、
はやぶさ2から投下された小型着陸機MASCOTの飛跡(立教大学)
もご覧ください。
無数の巨石と多数の石、砂の無い世界:「マスコット」、小惑星リュウグウ上でジグザクに移動
6分間の自由落下、そして小惑星表面に軽く衝突し11分間バウンドを続けて静止。これが、2018年10月3日早朝(中央ヨーロッパ夏時間)、小惑星リュウグウという驚きと神秘と挑戦に満ちた世界での「マスコット」(MASCOT)小惑星着陸機の旅の始まりでした。この最初の一歩の後、約17時間にわたって直径900mほどの小惑星での科学探査が続きました。「マスコット」へのコマンド送信や制御は、ドイツ・ケルンのドイツ航空宇宙センター(DLR、Deutsches Zentrum für Luft- und Raumfahrt)に設置された「マスコット・コントロール・センター」から行われ、そこには、ドイツ、フランス、日本からのサイエンスチームメンバーも詰めていました。「マスコット」は、小惑星上のいくつかの場所で4つの装置を使った計測をしましたが、それは私たちの期待を越えるものでした。このようなやり方で太陽系天体が探査されたのは、宇宙開発史上初めてのことです。現在、日本の「はやぶさ2」探査機による画像と「マスコット」着陸機による画像やデータを使って、「マスコット」がリュウグウ表面でどのように移動したのか、その経路を正確に把握することができます。
太陽系天体探査における今回の歴史的な成果についてDLRの宇宙探査技術部門のハンスヨーク・ディタス(Hansjörg Dittus)理事は、「この成功は、最新のロボット技術と、長期にわたる検討と、日本・フランス・ドイツという3つの宇宙開発国の科学者と技術者による徹底的な国際協力によってなしえたものです」と話しています。また、パスカル・エーレンフロイント(Pascale Ehrenfreund)DLR長官は「マスコットが、巨石や石だらけの小惑星リュウグウ上を移動したうえで、その組成についての非常に多くのデータを地球に送ることができたことについて、誇るべきことだと思います」と述べています。
「マスコット」は、推進のための装置は持っておらず自由落下で着地しました。「はやぶさ2」探査機からの分離から6分後、弾道飛行を経て、「マスコット」は小惑星リュウグウに最初に接触しました。リュウグウ表面では、タングステンでできた振り子をモーターによって加速・減速回転させることによって移動しました。このことによって、「マスコット」は正しい向きに姿勢を直したり、小惑星表面上をホップして移動したりすることができました。リュウグウ表面の重力は、地球の66,500分の1にしか過ぎませんので、少しの力で十分なのです。これは、小惑星表面での移動方法としてはこれまでとは異なる技術的革新であり、「はやぶさ2」ミッションの1つとして史上初めて使われたものです。
ゴツゴツした岩だらけで平らな場所がないロックガーデン(岩石庭園)を通過して
「マスコット」がリュウグウ表面をどのように移動したかを確認するために、「はやぶさ2」探査機に搭載されたカメラがリュウグウに向けられました。光学航法カメラ(ONC)は、「マスコット」が自由落下していく様子を数枚の写真に撮影しました。また、落下していく途中に「マスコット」の影が表面に落ちている様子を撮影し、最終的にリュウグウ表面の「マスコット」を数枚の画像で確認することもできました。表面にある無数の石の分布のようすは、「マスコット」に搭載されたDLRのマスカム(MASCAM)によっていろいろな地平線方向について写真撮影されています。この情報を組み合わせることによって、「マスコット」が移動した経路を特定することができました。
「マスコット」は、最後により遠くまでジャンプして移動しました。その最後の場所では、小惑星上での3日目の夜が始まる前に更なる観測を行い、「はやぶさ2」が「マスコット」の視野から見えなくなるまで通信を続けました。「マスコット」からの最後のシグナルが「はやぶさ2」に届いたのは、21:04(CEST:中央ヨーロッパ夏時間)でした。これで、ミッションは終わりました。「マスコット」のプロジェクトマネジャーでDLR宇宙システム研究所(the DLR Institute of Space Systems)のトラミ・ホー(Tra-Mi Ho)氏は、「夜側は冷えるのでバッテリーは16時間ももたないと思っていました」と述べ、続けて「ですが、結局、1時間以上も長く、電波が遮られてしまうまで、マスコットを運用することができました。これは大成功です。」と述べています。ミッションを行っているときに、「マスコット」の着地点(MA-9)を、ルイス・キャロル(Lewis Carroll, 1832-1898)の 著作にちなんで“アリスの不思議の国”とチームで名付けました。
本当の“不思議の国”
小惑星リュウグウで起こった出来事が分かった今、科学者たちは取得されたデータや画像から最初の結果を引き出そうと忙しく解析をしています。DLR惑星研究所(DLR Institute of Planetary Research)の所属で「マスコット」ミッションの科学の取りまとめをしているラルフ・ヨーマン(Ralf Jaumann)氏は、「遠方から見た光景から、表面で見る光景はある程度想像できていた」と話しています。「しかし、実際のところ、想像していたより表面の様子はすごいものでした。すべてが荒々しい岩で覆われていて、岩塊がまき散らされています。これらの岩がどのくらい緻密なものか、どのような成分できているのか、我々はまだ分かっていません。しかし、最も驚くべきことは、細かい物質が積もったところが全く見当たらないことです。これは、全く想像していませんでした。これから数週間かけて、この点について調査をしなければなりません。というのは、宇宙風化によって細かい物質が生じるはずだからです。」とヨーマン氏は続けて話しています。
「マスコットは、我々が想定したもの、つまり、探査機をリュウグウ表面まで延長してその場での直接計測するということを、まさしくその通りに実現しました。」とトラミ・ホー氏は言います。現在、広い範囲での観測がそろいました。地球からの望遠鏡による変光の観測から、「はやぶさ2」母船によるリモートセンシング観測、そして、「マスコット」によるミクロな観測です。「このことは、このリュウグウのような種類の小惑星の特性を調べるために非常に重要です。」とヨーマン氏は強調します。リュウグウはC型の小惑星、つまり、45億年も前の太陽系の状況を保った最も古い炭素に富んだ天体なのです。また、惑星誕生のもとになった始原的天体でもありますし、1万7千個にのぼる地球接近小惑星の1つでもあります。
地上には、リュウグウと似た成分であると思われる隕石が落ちてきます。たとえば、オーストラリアのマーチソン地域(Murchison Range)で発見されたものがそうです。しかし、DLR惑星研究所(DLR Institute of Planetary Research)の所属で熱放射計マラ(MARA)の責任者であるマチアス・グロット(Matthias Grott)氏によると、このような隕石がリュウグウの物理的性質を実際に持っているものか懐疑的にならざるを得ないということです。「マーチソンで発見されたような隕石はかなり中身が詰まったものです。ところが、MARAのデータによると、リュウグウの物質は、もう少しすき間が多い物質のように思えます。まだ解析が始まったばかりですが、リュウグウの小さな破片が地球大気に突入したとき、それが地上まで落ちてくることはないと考えられます。」とグロット氏は述べています。
「はやぶさ2」ミッションとMASCOTに関して
「はやぶさ2」とは日本の宇宙機関(JAXA、宇宙航空研究開発機構)の地球接近小惑星リュウグウへの探査ミッションです。「はやぶさ2」に搭載されたドイツ・フランス製の小型着陸機「マスコット」はドイツ航空宇宙センター(DLR、Deutsches Zentrum für Luft- und Raumfahrt)により開発され、フランスの宇宙機関であるフランス国立宇宙研究センター(CNES、Centre National d'Etudes Spatiales)と緊密に協力して製作されました。DLR、宇宙天体物理学研究所(the Institut d'Astrophysique Spatiale)、そしてブラウンシュヴァイク工科大学(Technical University of Braunschweig)は「マスコット」に搭載された科学的実験に貢献しました。CNESからの支援を受けつつ「はやぶさ2」チームと緊密に連絡をとりながら、「マスコット」着陸機の運用とその実験の制御をDLRが行いました。
「マスコット」の開発および試験は、CNESと共同してドイツ・ブレーメンのDLR宇宙システム研究所(the DLR Institute of Space Systems)が担当しました。着陸機の構造の安定に関しては、ドイツ・ブラウンシュヴァイクのDLR複合構造物・適応システム研究所(the DLR Institute of Composite Structures and Adaptive Systems)が担当をしました。ドイツ・オーバープファッフェンホーフェンにあるDLRロボティクス・メカトロニクスセンター(the DLR Robotics and Mechatronics Center)は、「マスコット」が小惑星上で飛び跳ねることを可能とするスイングアームを開発しました。ドイツ・ベルリンのDLR惑星研究所(the DLR Institute of Planetary Research)はマスカム(MASCAM)カメラとマラ(MARA)放射計の開発に貢献しました。ケルンのDLR内に所在する、微小重力利用支援センター(MUSC, the Microgravity User Support Center)のMASCOT管制室でマスコットはモニターされ運用がなされました。
(修正2018.10.13: 図の順番を修正)
-
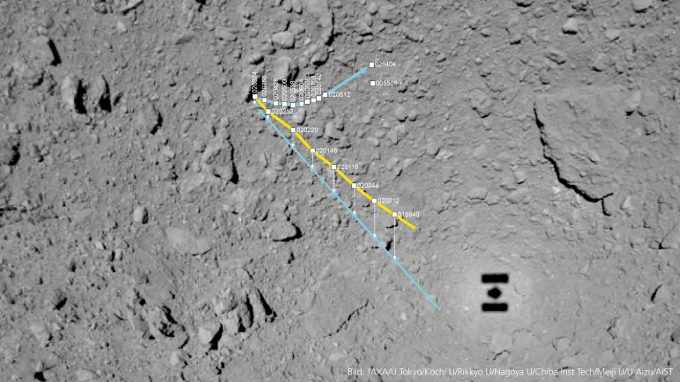
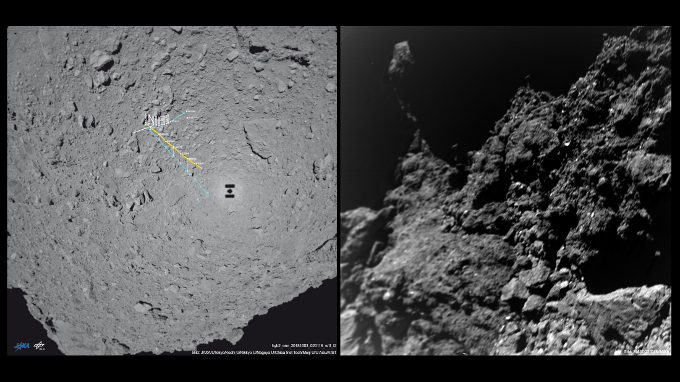
[別ウィンドウで開く(拡大)] 図1 MASCOTのリュウグウ接近と地表を横切る経路
画像クレジット: (※)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
-
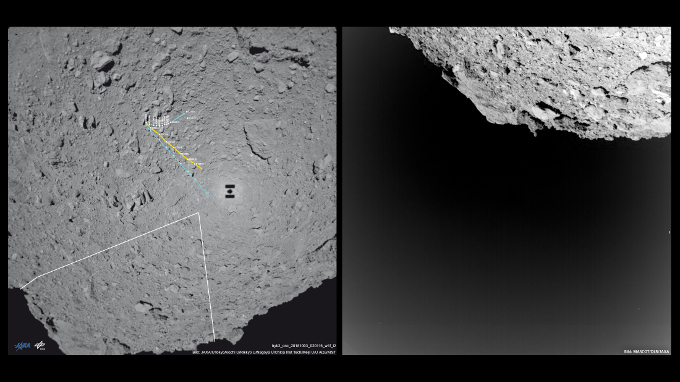
[別ウィンドウで開く(拡大)] 図2 MASCOTが分離後すぐに撮影したリュウグウ南極方向の画像
画像クレジット: (左※)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研 (右) MASCOT/DLR/JAXA
-
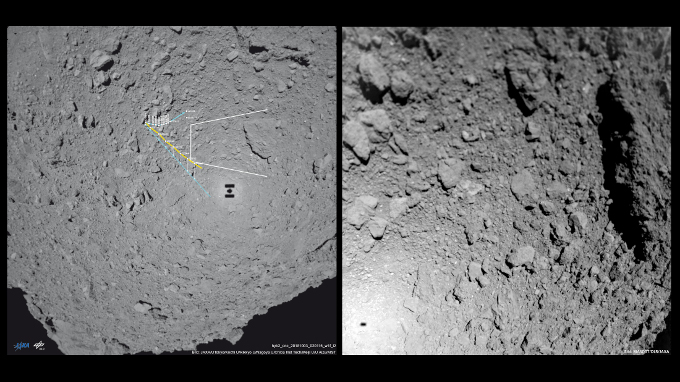
[別ウィンドウで開く(拡大)] 図3 MASCOTがリュウグウへ降下中に東方向を撮影した画像
画像クレジット: (左※)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研 (右) MASCOT/DLR/JAXA
-
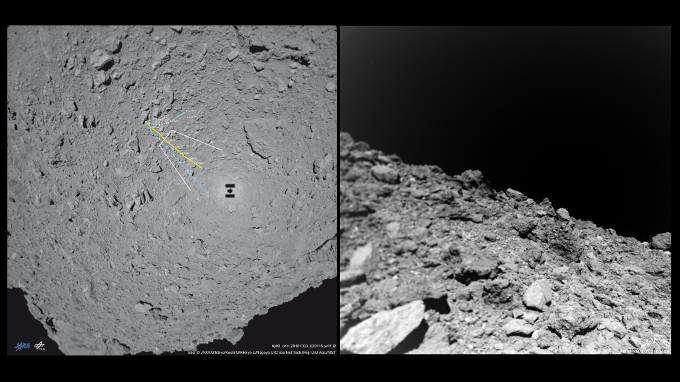
[別ウィンドウで開く(拡大)] 図4 MASCOTの降下中4枚目の画像 (修正2018.10.13: 視野範囲と撮像番号を訂正)
画像クレジット: (左※)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研 (右) MASCOT/DLR/JAXA
-
[別ウィンドウで開く(拡大)] 図5 最初に接地する直前に撮影した地表:着陸地点の環境
画像クレジット: (左※)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研 (右) MASCOT/DLR/JAXA
はやぶさ2プロジェクト
2018.10.12
※もしクレジットの短縮が必要な場合は「JAXA、東大など」と表記してください。