
スタートラッカによる火星の撮影
2016年10月11日と16日に、スタートラッカによる火星の撮影を行いました。
いつもこのサイトの記事を読んでくださっている方々のなかには「火星? 前にも撮らなかったっけ?」と思われる方もあるかもしれません。実際、2016年5月には光学航法望遠カメラ(ONC-T)による火星撮影が行われました(こちらの記事参照。光学航法望遠カメラはスイングバイ時に地球の画像を撮ったカメラとして、印象に残っておられる方も多いと思います)。しかし今回は「スタートラッカ」による撮影です。しかもこの撮影は、「はやぶさ2」が小惑星リュウグウにきちんと到着するための大事な準備の一つでもあるのです。今回はこれについて解説します。
「スタートラッカ」(筆者のパソコンでは最初「スタート落下」と変換されてしまいましたが、区切りは「スター・トラッカ」です)というのは、探査機が星の配置を見て自分の姿勢(向き)を知るための装置です。探査機は普段、電力を得るために太陽電池パドルを太陽のほうに向けたり、地球と通信するためにアンテナを地球のほうに向けたりしなければなりません。そのためには「今自分がどちらを向いているのか?」を知ることが大変重要です。しかし宇宙は上下左右前後の区別がありませんから、周囲に広がる星々を目印として自分の姿勢を把握するのです。ちょうど昔の船乗りや飛行機乗りが、星を頼りに海や空を進んでいたのと似ています。例えば地上でも、目の前に北極星が見えたら、自分がいま北を向いているとわかりますよね。「はやぶさ2」のスタートラッカも常に星を眺めていて、見えた星を自分の持っている星の一覧表(スターカタログ)と比べて、自分の姿勢を計算しています。「はやツー君」でいうと、ちょうどおでこの部分にサングラスのようについている2本の筒がスタートラッカです(普段は片方だけを使っています。万が一、片方が壊れても大丈夫なように2本ついています)。
しかし、今回スタートラッカで火星を撮影したのは、姿勢を知るためではありません。ある意味、スタートラッカとしては非常に特殊な使い方をしたといえます。その目的は、リュウグウに接近するときに用いる「光学航法(OPNAV)」という手法の予行演習です。
「光学航法(OPNAV)」は、画像を使って探査機の「位置」を推定し、対象天体に近づけていく手法です。上のほうに書いたスタートラッカの説明は探査機の「向き」のコントロールでしたが、今回は「位置」のコントロールをしているところがちょっと違います。惑星などの大きな天体と違ってリュウグウは非常に小さいので、そこに探査機を接近させるのはそう簡単ではありません。そこで「はやぶさ2」からリュウグウを撮影し、撮影した画像からリュウグウの方向を知ることで「自分が今、リュウグウに対してどのあたりにいるのか?」を地上で導き出し、精密な誘導を行う、というのが光学航法です。「はやぶさ2」がリュウグウに近づいていくにつれて、リュウグウの見える方向は変化していきます。つまり、恒星のあいだをリュウグウが少しずつ動いていくように見えます。この画像上のリュウグウの動きと電波による軌道決定を組み合わせて、精密な誘導を実施します。この手法は「はやぶさ」初号機がイトカワに接近するときにも使われた、実績ある技術です(こちらの記事参照)。
光学航法では、リュウグウの撮影に光学航法望遠カメラ(ONC-T)やスタートラッカを使うことを想定しています。単にリュウグウを光の点として撮影できればよいので、普段は姿勢の計測にしか使っていないスタートラッカも十分に戦力になります。本番では、最初のころはスタートラッカ、後半になってくると光学航法望遠カメラ(ONC-T)に切り替えるので、それぞれ予行演習を行っておかなくてはなりません。光学航法望遠カメラ(ONC-T)による火星の撮影は5月に行ったので、スタートラッカによる撮影を今回行ったというわけです。撮影時期が違うのは、スタートラッカと光学航法望遠カメラ(ONC-T)の向いている方向が違い、火星が視野に入ってくる時期も違ってくるからです。
スタートラッカによる火星の撮影は、以下のようにして行われました。まず、火星がちょうどスタートラッカの視野に入るように、探査機の姿勢を変えます。次に、スタートラッカを写真撮影モードにします。普段スタートラッカは星を撮影してもその画像を保存せずに自分の中での姿勢計算にだけ使いますが、写真撮影モードでは画像として保存することができるのです。ただしスタートラッカの仕様で、一度に画像全体を保存することができず、一部の範囲しか保存できません。そこで、ちょうどデジカメでパノラマ画像を作るように、複数の小さな画像を保存してあとで貼り合わせることにしました。貼り合わせ作業と、その結果を用いた火星の方向の計算は、リュウグウの地上観測のエキスパートである地上観測チームが実施しました(解析にはastrometry.net (Lang et al., 2010, AJ, 139, 1782)というソフトウェアが用いられました)というソフトウェアが用いられました)。
図1は、そうやって貼り合わせて作った2016年10月11日の火星とその周辺の画像です。中央付近にひときわ明るく輝いているのが火星です。また周囲にたくさんの恒星も見えています。縦の縞模様は分割して撮影した際の跡ですが、光学航法には影響しません。また、貼り合わせに使った部分画像の大きさを赤枠で示しています(全部で16枚を貼り合わせています)。いつもは寡黙に姿勢を計算するだけの機器であるスタートラッカも、このように光学航法望遠カメラ(ONC-T)に負けずとも劣らない星空画像を生み出すことができるのだと、頭ではわかっていましたがあらためて実感した次第です。
-
 図1:スタートラッカが2016年10月11日に撮影した火星とその周辺(地上観測チーム作成)。赤枠は貼り合わせに使った部分画像1枚分の大きさを表している。(赤枠の視野は、300×300ピクセル、一辺5.86度である)
図1:スタートラッカが2016年10月11日に撮影した火星とその周辺(地上観測チーム作成)。赤枠は貼り合わせに使った部分画像1枚分の大きさを表している。(赤枠の視野は、300×300ピクセル、一辺5.86度である)
この図1の画像だけ見て、空のどちらの方向を撮影したものか、皆さんはわかりますか? 筆者はまったくわかりませんでしたが、地上観測チームはこの背景に写っている星々がくじゃく座の星であると即座に導き出しました。背景の星がわかれば、火星(本番ではリュウグウ)が探査機から見てどちらに見えているかがわかります。本番ではその情報をもとに探査機を誘導していくことになります。なお、くじゃく座という星座は馴染みのない方が大半だと思いますが南天に見える星座で、日本だと奄美大島近辺より南でないと見えないそうです。くじゃく座の星座線と星名を書き入れたものが図2です。
-
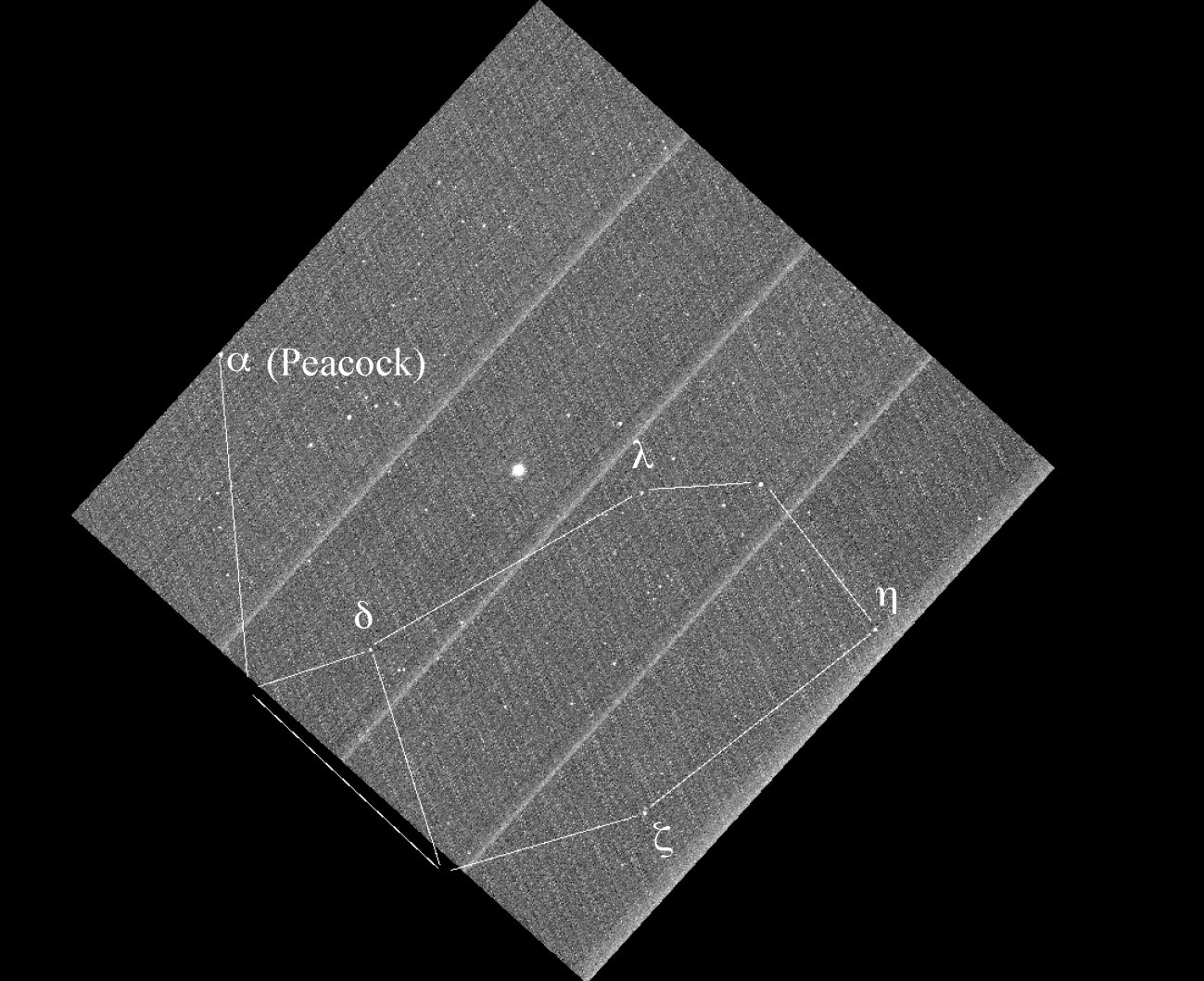 図2:スタートラッカが撮影した火星にくじゃく座を重ね合わせたもの(地上観測チーム作成)
図2:スタートラッカが撮影した火星にくじゃく座を重ね合わせたもの(地上観測チーム作成)
さらに、10月11日の画像と10月16日の画像を重ね合わせたものが図3です。探査機から見た火星が少しずつ星々の間を動いて行くのがよくわかると思います。
-
 図3 探査機から見た火星の位置の変化。2016年10月11日と10月16日に撮った画像を重ね合わせたもの。
図3 探査機から見た火星の位置の変化。2016年10月11日と10月16日に撮った画像を重ね合わせたもの。
2018年の初夏にはこんなふうに目的地リュウグウがスタートラッカの視野に見えてくるはずです。最初は非常に暗くかすかに、しかし接近するにつれて次第に明るくなっていくでしょう。「翼よ、あれがリュウグウの灯(?)だ」と感慨にふける間もなく、プロジェクト総動員でのミッションフェーズが幕を開けることになります。到着まで、あと1年半です。
はやぶさ2プロジェクト N.O.
2016.12.26