
TCMの加速を確実にする姿勢制御系
− ピンポイントな位置に導かれるカメさんの「よそ見」を防ぐ −
はやぶさ2は姿勢制御のためのリアクションホイールを4個搭載しています。その4つとは、回転軸が探査機固定座標系Xsc軸を向いたRW-X, Ysc軸方向を向いたRW-Y、Zsc軸方向を向いたものはRW-Z1、RW-Z2の2つです(図)。TCMの時は、この中のRW-X、RW-Y、RW-Z1を動かし、RW-Z2は回転を止めています。
-
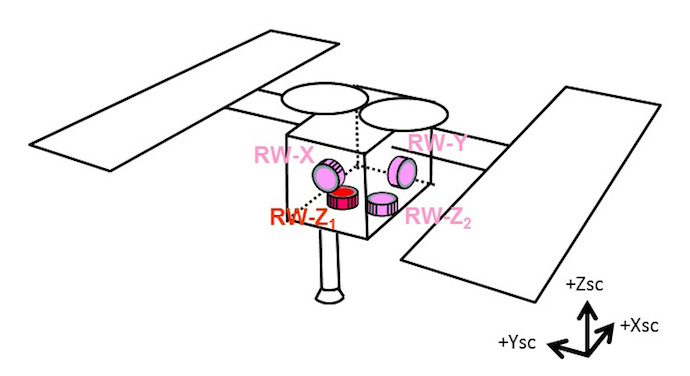 はやぶさ2のリアクションホイール(RW : Reaction Wheel)の配置
はやぶさ2のリアクションホイール(RW : Reaction Wheel)の配置
:RW-X, RW-Y, RW-Z1, RW-Z2
リアクションホイールとはモータの本体が探査機本体に固定され、軸にはコマのようなホイールがついている姿勢制御用の機器です。ホイールは姿勢制御が必要ない時には一定回転角速度で回転していますが、姿勢制御のためのトルクが必要な時にはモータに流れる電流を変化させてホイールにトルクを加え、その反力トルクが探査機本体の姿勢を正しい方向に向けるように働きます。
TCM1では化学推進系が今までになく長く噴射して大きな力積を出しました。化学推進系は向きの異なる2本のスラスタを噴射することで姿勢制御にも使われるのですが、TCM1では、ほぼ同じ方向を向いた2本のスラスタを同じ時間噴射して探査機全体の並進速度を加速しました。
12本あるスラスタには微妙な性能の差があるので、同じ時間噴射しても出す力積が異なる可能性がありました。その際は探査機の姿勢が変わってしまい、軌道を制御するための正確な加速の実現に影響することを心配していましたが、TCM1での4回の噴射で探査機の姿勢は少しだけふらついただけで加速に影響はなく、加速後、スラスタによる姿勢制御とX,Y,Z軸方向に配置された3個のリアクションホイールによる姿勢制御によって、その姿勢はきちんと元に戻りましたし、加速の精度も満足のいくものでした。この加速の量は搭載している加速度計のデータとも整合するもので、今後のTCM2、TCM3に向けて貴重な実績を積むことができました。
お話ししましたように、TCMの時にはRW-X、RW-Y、RW-Z1を回転させRW-Z2は回転を止めていますが、地球スイングバイの後は、更にRW-X、RW-Yの回転も止めて、RW-Z1だけを動かして姿勢制御を行います。このようにリアクションホイールの回転を止めてしまうのは、はやぶさ初号機での教訓を反映し、ホイールの寿命を考えてのことで、Ryuguについた時には再びRW-X、RW-Y、RW-Z1を動かして正確な姿勢制御を行い、サイエンス観測などを行います。RW-Z1、RW-Z2とZsc軸方向に2つホイールを積んでいるのは、はやぶさ初号機がZsc軸方向のホイールだけが生き残った状態で地球に帰還することができたことの教訓を反映しています。
TCMのように普段やらない運用を実施すると、その時の探査機の姿勢の振る舞いなどから、探査機の重心位置や積んでいる加速度センサー、角速度センサーの特性、スラスタの性能、リアクションホイールの性能などがより正確にわかってきます。その結果として探査機搭載計算機内の姿勢制御アルゴリズム(ソフトウエア)を介した探査機の動的な振る舞い(カメの習性)をより正確に予測することができるようになってきます。
カメ(=探査機)の習性に関するこのようなデータを積み上げていくことは、カメがRyuguに着いてから、その周辺を飛行、接近、着陸などを行うときに、その位置や姿勢を正確に制御するために非常に有益です。これからも運用を通じて「カメさん」の気持ちを理解していきたいと思います。
(F.T. : 2015.11.24)