
The operation to deploy the MASCOT lander to the surface of asteroid Ryugu will take place between September 30 – October 4. On September 30 and October 1, operations will involve preparation for the descent of the spacecraft, which will begin the decent from the home position (altitude of about 20km) on October 2. The separation of MASCOT is scheduled for October 3.
The provisional schedule at the current time is shown in the following table. A priority during operations is the safety of the spacecraft, so please note that the schedule may change depending on the situation.
MASCOT main schedule for deployment
| Date & Time(UTC) | Date & Time(JST) | Spacecraft speed (cm/s) | HP altitude (m) | Near-point altitude (m) | Event |
|---|---|---|---|---|---|
| 9/30 00:00 | 9/30 09:00 | 0 | 20,000 | Communication via Usuda Deep Space Center begins | |
| 9/30 08:40 | 9/30 17:40 | Communication via Madrid DSN begins | |||
| 10/1 00:00 | 10/1 09:00 | Comm. via Usuda begins | |||
| 10/1 16:00 | 10/2 01:00 | Comm. via Goldstone DSN begins | |||
| 10/2 00:00 | 10/2 09:00 | Comm. via Usuda begins | |||
| 10/2 02:50 | 10/2 11:50 | -40 | 20,000 | Begin descent | |
| 10/2 07:00 | 10/2 16:00 | Comm. via Canberra DSN begins | |||
| 10/2 08:20 | 10/2 17:20 | Comm. via Madrid DSN begins | |||
| 10/2 13:10 | 10/2 22:10 | -10 | 5,032 | Decelerate descent speed ΔV | |
| 10/2 16:00 | 10/3 01:00 | Comm. via Goldstone DSN begins | |||
| 10/2 21:40 | 10/3 06:40 | 2,000 | |||
| 10/2 21:50 | 10/3 06:50 | 1,500 | |||
| 10/2 23:20 | 10/3 08:20 | Comm. via Usuda begins | |||
| 10/3 00:30 | 10/3 09:30 | 500 | |||
| 10/3 01:20 | 10/3 10:20 | 250 | |||
| 10/3 ~02:00 | 10/3 ~11:00 | ~60 | Target altitude reached | ||
| 10/3 ~02:00 | 10/3 ~11:00 | -3 | Decelerate descent speed ΔV | ||
| 10/3 ~02:00 | 10/3 ~11:00 | ~60 | MASCOT deployment | ||
| 10/3 ~02:00 | 10/3 ~11:00 | +50 | ~60 | Post deployment upward ΔV | |
| 10/3 02:30 | 10/3 11:30 | 1,000 | |||
| 10/3 06:50 | 10/3 15:50 | 0 | 3,000 | Confirmation of start of hovering | |
| 10/3 08:20 | 10/3 17:20 | Comm. via Madrid DSN begins | |||
| 10/3 16:00 | 10/4 01:00 | Comm. via Goldstone DSN begins | |||
| 10/4 00:00 | 10/4 09:00 | Comm. via Usuda begins | |||
| 10/4 08:20 | 10/4 17:20 | Comm. via Madrid begins | |||
| 10/4 11:30 | 10/4 20:30 | TBD | Increase ΔV to return to home position | ||
| 10/4 16:00 | 10/5 01:00 | Comm. via Goldstone DSN begins | |||
| 10/5 00:00 | 10/5 09:00 | Comm. via Usuda DSN begins | |||
| 10/5 06:00 | 10/5 15:00 | 0 | 20,000 | Return to home position |
- Time:Approximate schedule time (in 10 minute increments). There is a possibility that this may change during operation. The time is the onboard time, so confirmation of the event is the radiowave propagation time of about 17 ~ 18 minutes later.
- Spacecraft speed:This is the speed relative to the asteroid (minus is towards the asteroid, positive is away). Numerical value is displayed only when speed control is performed. After a speed control operation, the speed changes due to the gravitational force of Ryugu and other celestial bodies.
- HP altitude :Distance to the center of Ryugu.
- Near point altitude:Distance to the surface of Ryugu.
Deployment sequence
-
[open in another window]
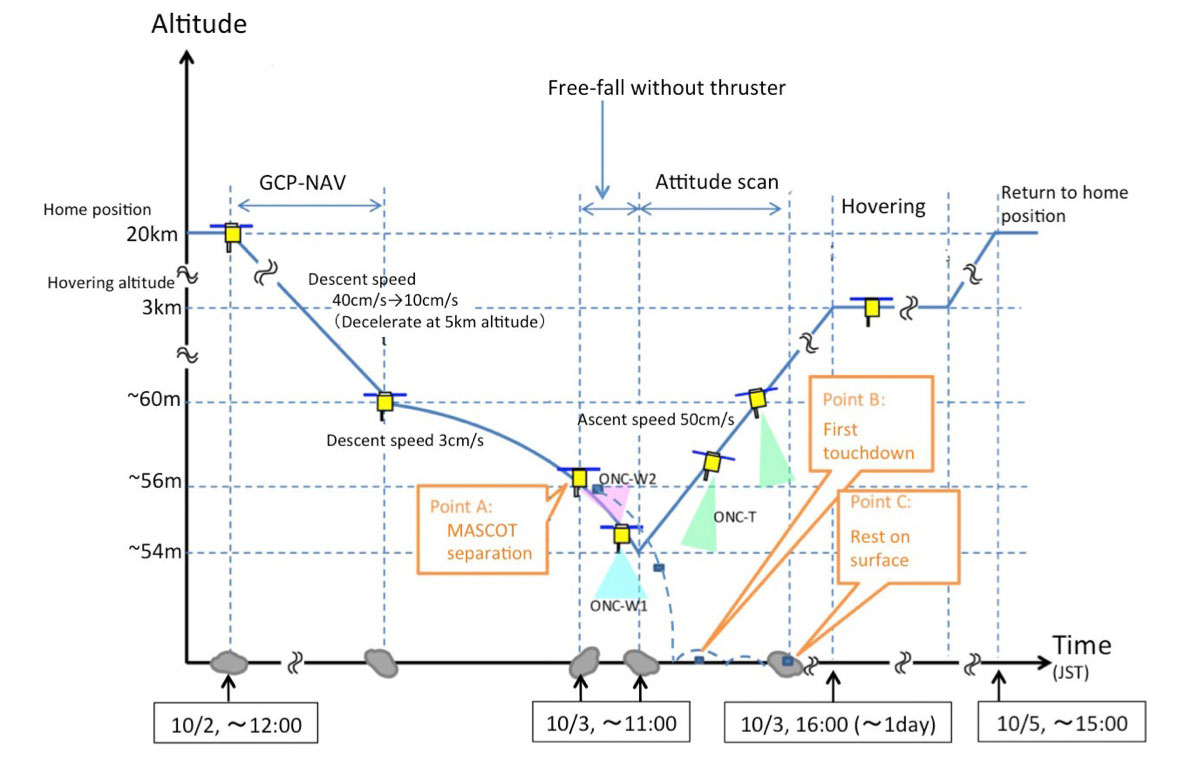
Figure 1: Schematic of the MASCOT deployment operation sequence.(©JAXA)
- GCP-NAV:Ground Control Point Navigation, tool for image guided navigation during the descent operation
- ONC-T:Optical Navigation Camera Telescopic (installed on the bottom of the spacecraft).
- ONC-W1:Optical Navigation Camera Wide angle (installed on the bottom of the spacecraft).
- ONC-W2:Optical Navigation Camera Wide angle (installed on the side of the spacecraft).
- Attitude scan:change the attitude of the probe to photograph MASCOT.
MASCOT sequence
-
[open in another window]
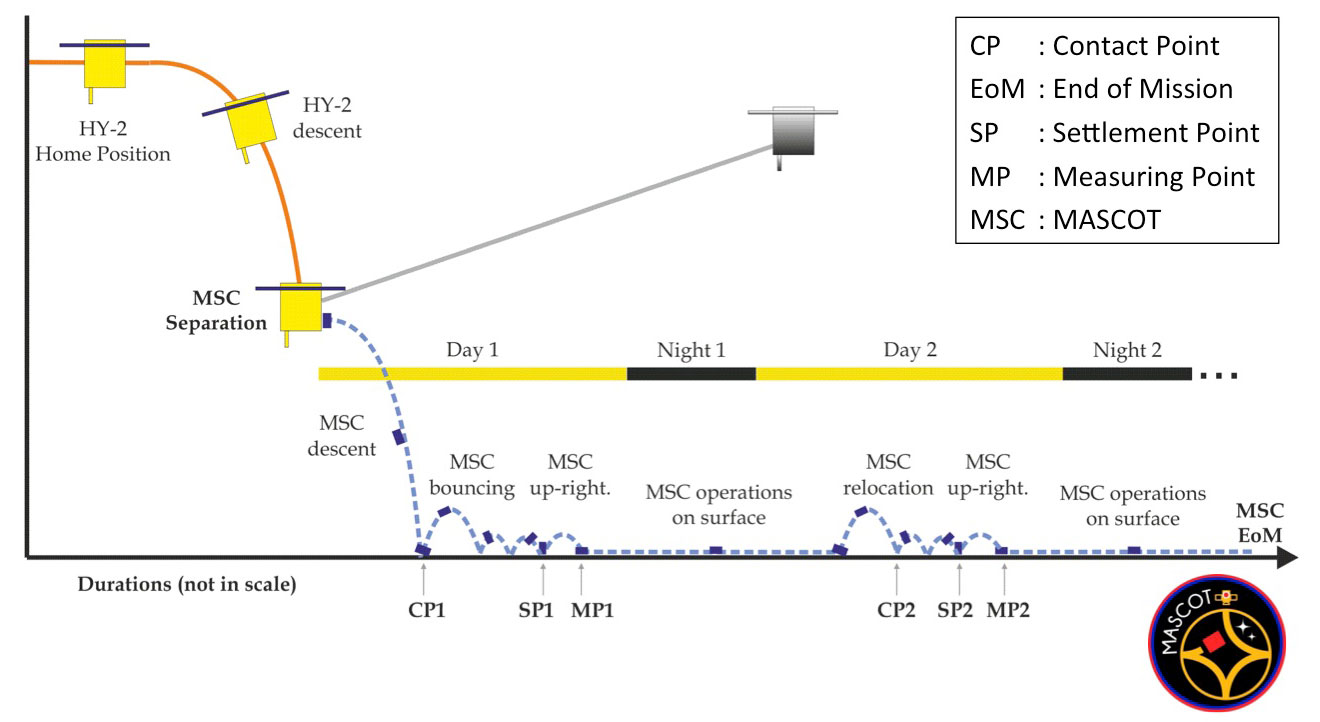
Figure 2: Schematic of MASCOT operation on Ryugu.(©DLR)
Note: Data from MASCOT will be processed and analyzed by the MASCOT team in Germany and France. The data from MASCOT will also be published by the MASCOT team.
Hayabusa2 project
2018.10.02