
MASCOT (Mobile Asteroid Surface Scout) is the asteroid lander jointly developed by DLR (German Aerospace Center) and CNES (French National Center for Space Studies). MASCOT is stored on the -Y-plane side of Hayabusa2 (this is the left-hand side surface when the high gain antenna is at the head and the ion engine is at the spacecraft back) and deployed from this position (see Figure 1).
-
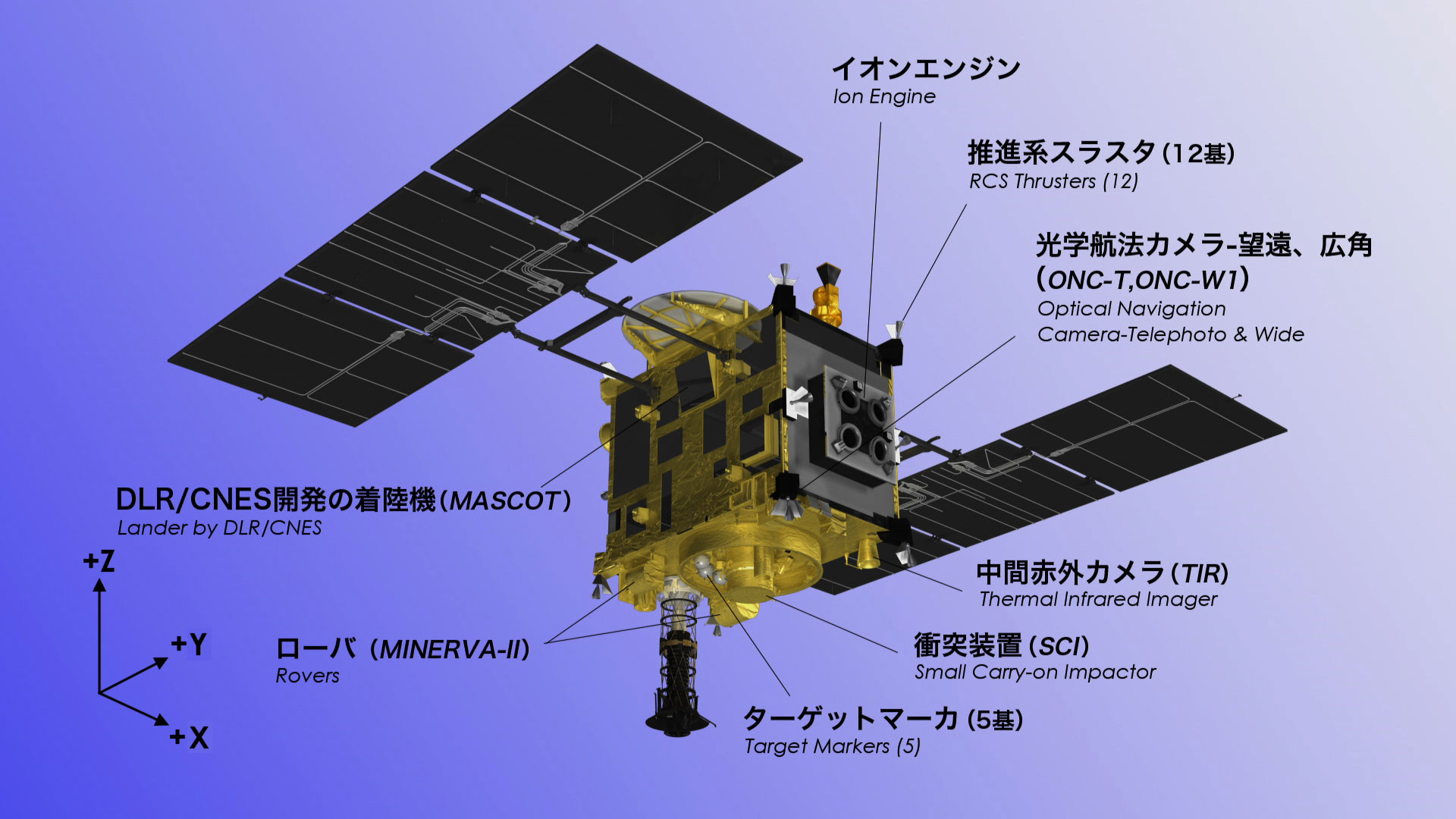
[open in another window] Figure 1: Illustration of the Hayabusa2 spacecraft. MASCOT is stored on the -Y-plane (left side) panel.(Image credit:JAXA)
MASCOT has the shape of a cuboid with dimensions 0.3 x 0.3 x 0.2m. The lander weighs about 10kg, and is a bit larger and heavier than the MINERVA-II1 rovers (diameter: 18cm, height: 7cm, weight: 1.1kg). (Figure 2).
-

[open in another window] Figure 2: Flight model of MASCOT (Image credit: DLR)
On the top side of MASCOT is an antenna to communicate with the repeater (OME-E) of Hayabusa2, as with MINERVA-II1. A wide-angle camera (MASCAM) is mounted on the side to capture images of the lander’s surrounding. An infrared spectroscopic microscope (MircOmega) sits on the bottom surface of MASCOT to investigate the composition and characteristics of the minerals on the surface of Ryugu. There is also a thermal radiometer (MARA) to measure the surface temperature and a magnetometer (MasMag) to measure any magnetic field.
MASCOT also has a hopping mechanism similar to that of MINERVA-II1. Using a motor to rotate a swing-arm within the lander, MASCOT can change its attitude or jump. Since MASCOT is designed to operate in the position where the top antenna is directed upwards and the spectroscopic microscope faces downwards, this hopping mechanism can correct the attitude if the lander is in a different orientation once on the surface of Ryugu. MASCOT can also use the hop to move locations once; the lander does not hop multiple times like the MINERVA-II1 rovers.
-
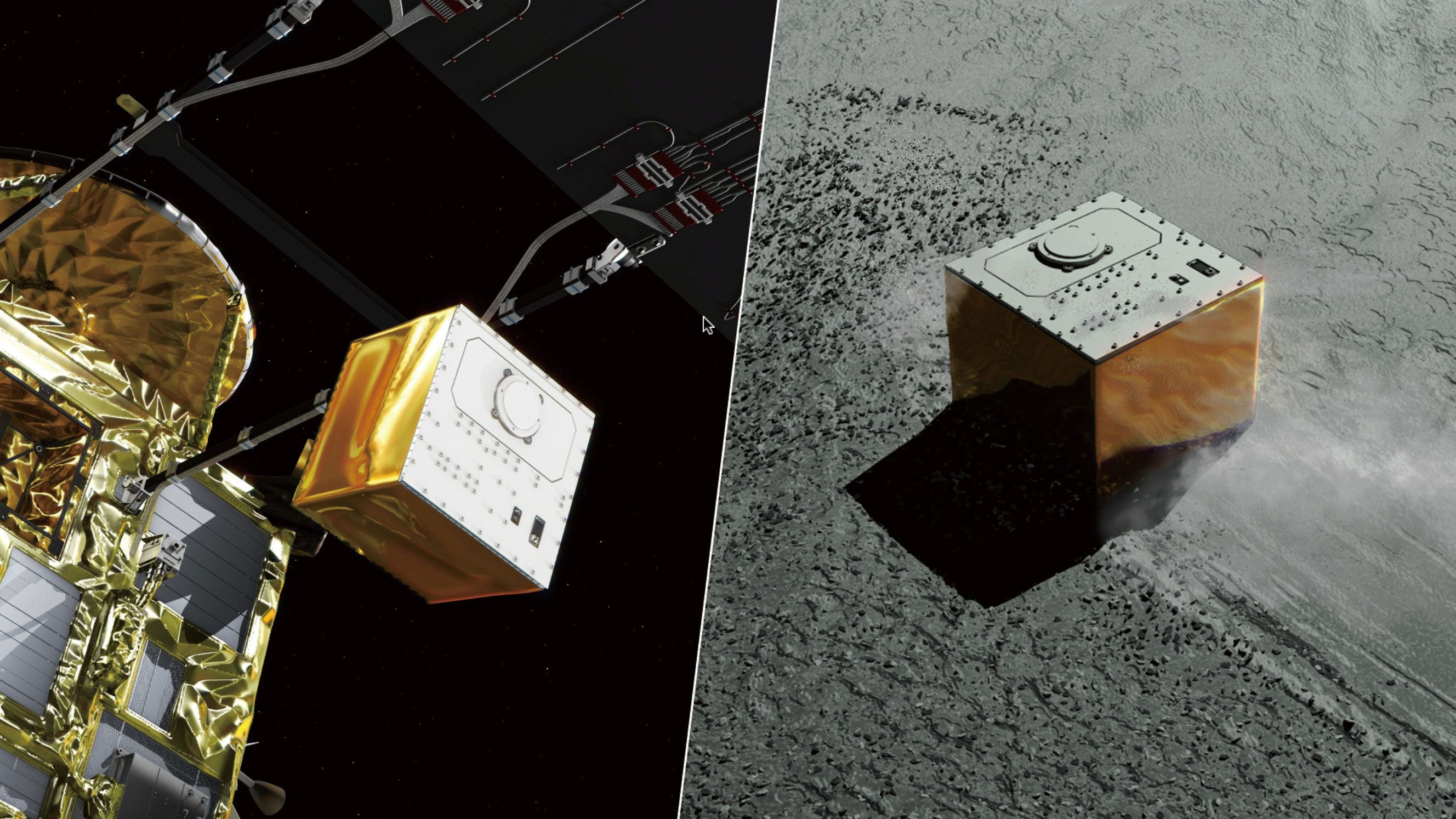
[open in another window] Figure 3: Left: Illustration of MASCOT separating from Hayabusa2. Right: Illustration of MASCOT landing on the surface of Ryugu. (Image credit: JAXA)
For the landing site for MASCOT, a region in the southern hemisphere of Ryugu was selected (Figure 4). This location was selected based on criteria that ensured no overlap between the landing sites for the touchdown of Hayabusa2, MINERVA-II1 and MASCOT, the time to be able to communicate with Hayabusa2, the duration of sunlight exposure and expectation of scientifically meaningful exploration.
-
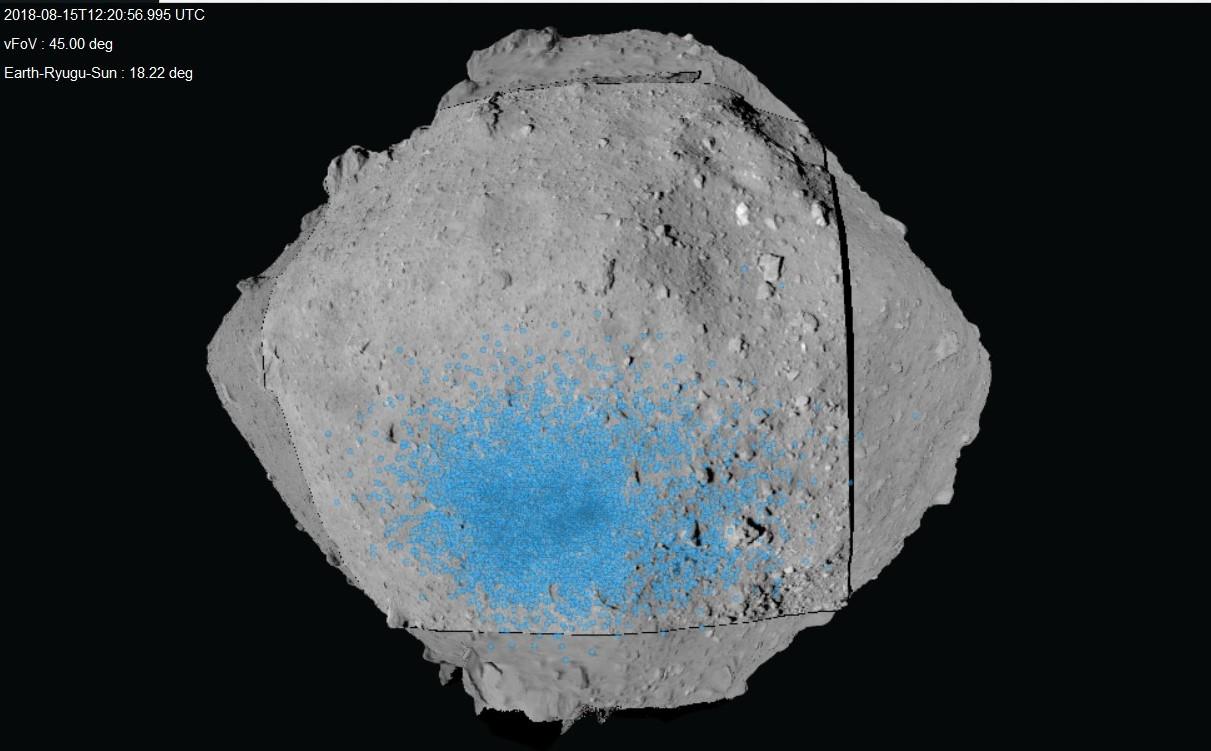
[open in another window] Figure 4: MASCOT landing site candidate region (light blue area). Since MASCOT is expected to bounce several times after first touching down, a reasonably wide region is selected.
(Image credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST, CNES, DLR).
MASCOT does not use solar cells but is equipped with a lithium primary battery built into the lander. The duration of the battery is about 16 hours (about two rotations of Ryugu), allowing MASCOT to operate continuously for two Ryugu days after a successful separation. Operation of the lander will end when the battery runs out.
Hayabusa2 project
2018.10.02