
小惑星リュウグウ近傍でのこれまでの探査機運用結果を踏まえて、本年(2018年)10月末に予定していましたタッチダウンを延期して、来年1月以降に行うことにしました。
2018年内の今後の主要な運用は次のようになります。
・10月14日〜15日:TD1-R1-A(2回目のTDリハーサルに相当)
・10月24日〜25日:TD1-R3(3回目のTDリハーサルに相当)
・11月下旬〜12月 :合運用
1回目のタッチダウンを行う時期につきましては、上記のTD1-R3までの結果を踏まえて、合運用期間中に検討する予定です。
このような判断に至った理由は大きく2つあります。1つは、これまでの運用でリュウグウの表面状態がよく分かってきたこと、もう1つは探査機の航法誘導の精度が分かってきたことです。
まず、リュウグウの表面ですが、到着当初から分かっていたように多数のボルダー(岩塊)で覆われていて、広い平らな領域はありません。そこで、タッチダウンにとって相対的に安全な場所として、L08、L07、M04という着地候補地点が選定されました。これらの候補地点について更に詳しく調べたところ、これまで得られたデータでは、L08の領域の中の一部が最もよさそうだということになりました。プロジェクトチームでは、L08-Bと名付けた領域です(図1)。
-
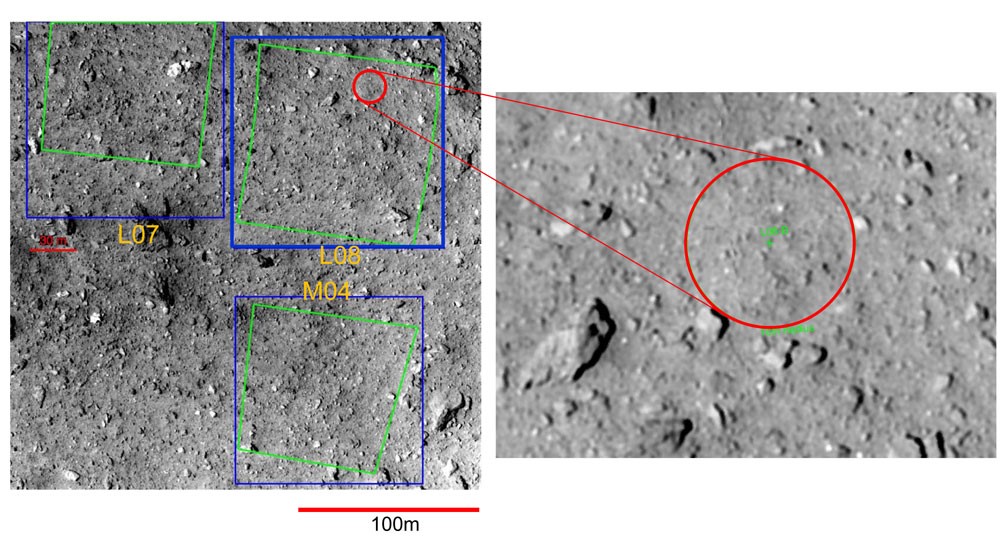
[別ウィンドウで開く] 図1 タッチダウン候補地点L08、L07、M04(左)。赤い丸はL08-Bと名付けられた領域。写真は、タッチダウン1リハーサル1(TD1-R1)において2018年9月12日に約3kmの高度からONC-T(望遠の光学航法カメラ)によって撮影されたもの。
(画像クレジット※:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
探査機がタッチダウンするためには、高さが50cmくらいより大きいボルダーがあると危険です。サンプラーホーンの長さが1m程度ですから、探査機がタッチダウンのときに少し傾くことも考慮すると、50cm程度以上の高さのボルダーがあると探査機本体や太陽電池パドルがぶつかってしまう可能性があるからです。この観点からみると、L08-Bという領域には50cmよりも大きいボルダーはなさそうです(図2)。50cmよりも大きなボルダーがない領域で最も広いところがL08-Bとなります。
-
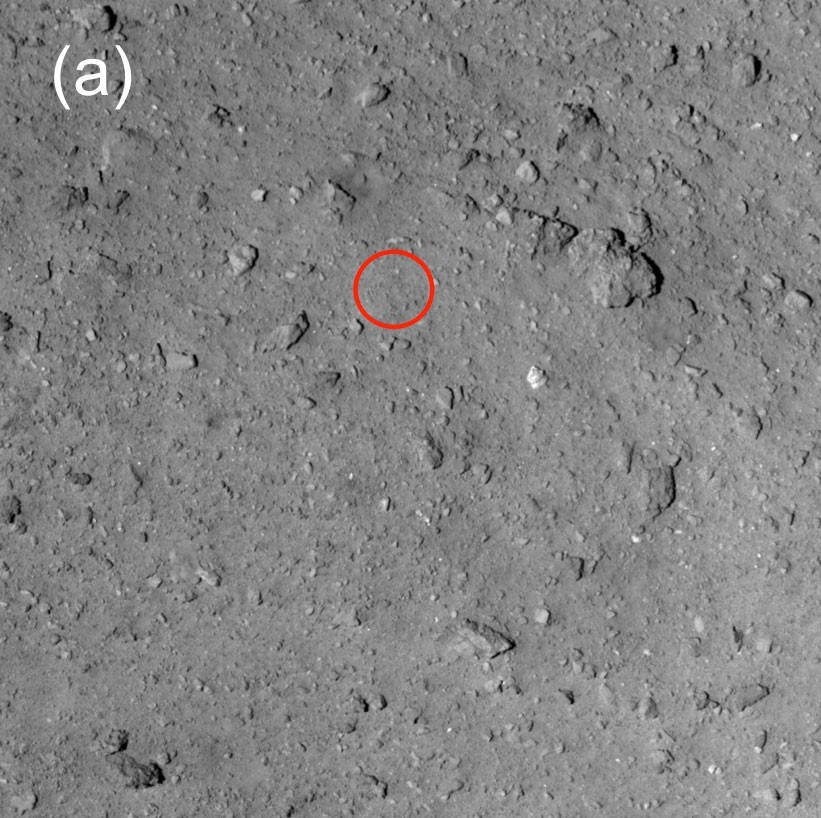
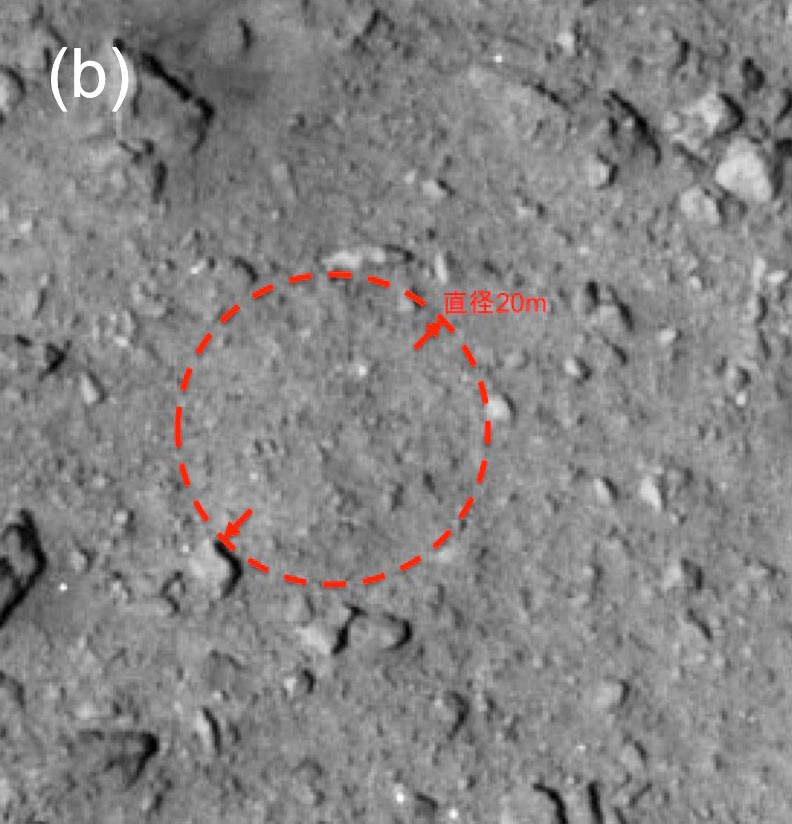
[別ウィンドウで開く (a)] [(b)] 図2 より低高度から撮影したL08-B(赤丸で囲まれた領域)とその周辺領域。MASCOT分離運用の時に、高度約1.9kmからONC-T(望遠の光学航法カメラ)で撮影されたもの。撮影日時は、2018年10月3日、05:41(日本時間)。
(画像クレジット※:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
問題は、L08-Bという領域の広さが直径で約20mしかないことです。当初は、半径50m(直径100m)くらいの平らな領域なら安全にタッチダウンできるということを想定していましたが、それが半径10mになってしまったわけです。これはかなり厳しい制約です。一方、MINERVA-II1やMASCOTの分離運用で高度50m程度まで降下ましたが、リュウグウ表面から50mくらいの高さまでなら探査機を約10mの位置精度で誘導できることも確認できました(図3)。これは、タッチダウンに向けて明るい材料です。
-
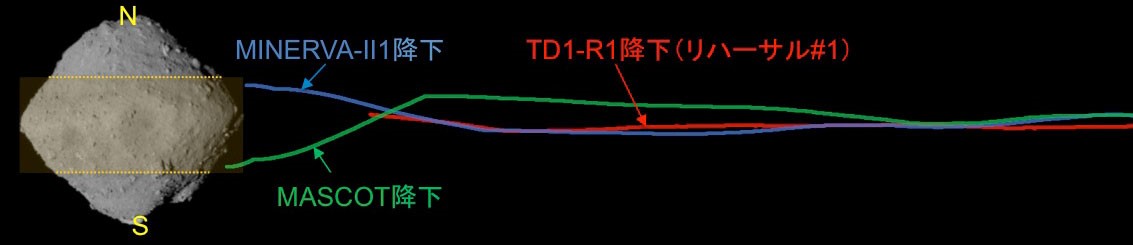
[別ウィンドウで開く] 図3 3回の降下運用における軌道。TD1-R1は赤道域、MINERA-II1運用は北半球、MASCOT運用は南半球の中緯度に降下した。はやぶさ2の守備範囲である緯度±30°の全域にわたって、高度約50mまでは精度10m程度で誘導できることが確認できた。(画像クレジット:JAXA)
高度50mまでは10mの位置誤差で探査機を制御できますが、そこから表面に降りるところで、どこまで精度を保てるかが問題になります。タッチダウンを行うまでにこのことを確認する必要があります。そこで、タッチダウンそのものは来年に延期して、年内は上記のTD1-R1-AとTD1-R3の2回のタッチダウン・リハーサルを行うことにしました。
確認すべきことは、高度50m以下での航法誘導精度です。その確認においは、まずLRF(レーザ・レンジ・ファインダ:近距離での高度計測を行う)の特性を把握する必要があります。本来ならば、最初のタッチダウン・リハーサル(TD1-R1:2018年9月10-12日)においてLRFの確認をする予定でした。しかしそのときはLIDAR(レーザ高度計)が近距離計測モードに切り替わらないという事象が生じてLRFの確認ができませんでした。LIDARについてはその後の運用で問題はないことが確認されましたので、LRFの確認が必要です。これを、TD1-R1-Aで行います。
TD1-R3では、TD1-R1-Aの結果によって確認項目が変わりますが、仮にTD1-R1-AでLRFの特性が当初の想定どおりであると確認されれば、TD1-R3ではLRFの計測結果を制御に取り込むことや、さらに可能であればターゲットマーカ(TM)を分離して、探査機がきちんとTMをトラッキングできるかの確認を行う予定です。
これらの運用結果を詳しく検討し、最初のタッチダウンに向けた計画を立てることになります。さらには、小型ローバMINERVA-II1や小型着陸機MASCOTからのリュウグウ表面からのデータも続々と得られており、タッチダウンに向けて重要な情報となっています。第1回タッチダウンの予定が変更になりますが、全体スケジュールには十分にマージンがあり、プロジェクトとしてはこれまで得られた様々な情報を総合的に判断してより確実で安全な運用を目指したいと考えています。
はやぶさ2プロジェクト
2018.10.14
※ 画像を引用する場合にはクレジットを記載してください。もしクレジットの短縮が必要な場合は「JAXA、東大など」と表記してください。