
5月11日から14日にかけて、「はやぶさ2」に搭載されているスタートラッカによって小惑星リュウグウの撮影をしましたが、そのデータを使って光学航法(オプティカル・ナビゲーション:Optical Navigation)を行っています。
2018年5月20日現在、「はやぶさ2」は地球から約2億8700万km(図1)、リュウグウからは約4万kmのところにいます(図2)。リュウグウの大きさはまだ正確には分かっていませんが、直径が900m程度と推定されています。つまり、地球から約3億kmの彼方で900mのターゲットに到着する必要があるのです。そのために必要な技術が光学航法です。(ちなみに、3億km先の900mというのは、2万km先の6cmと同じです。つまり、日本からブラジルにある6cmの的を狙うのと同じことになります。)
-
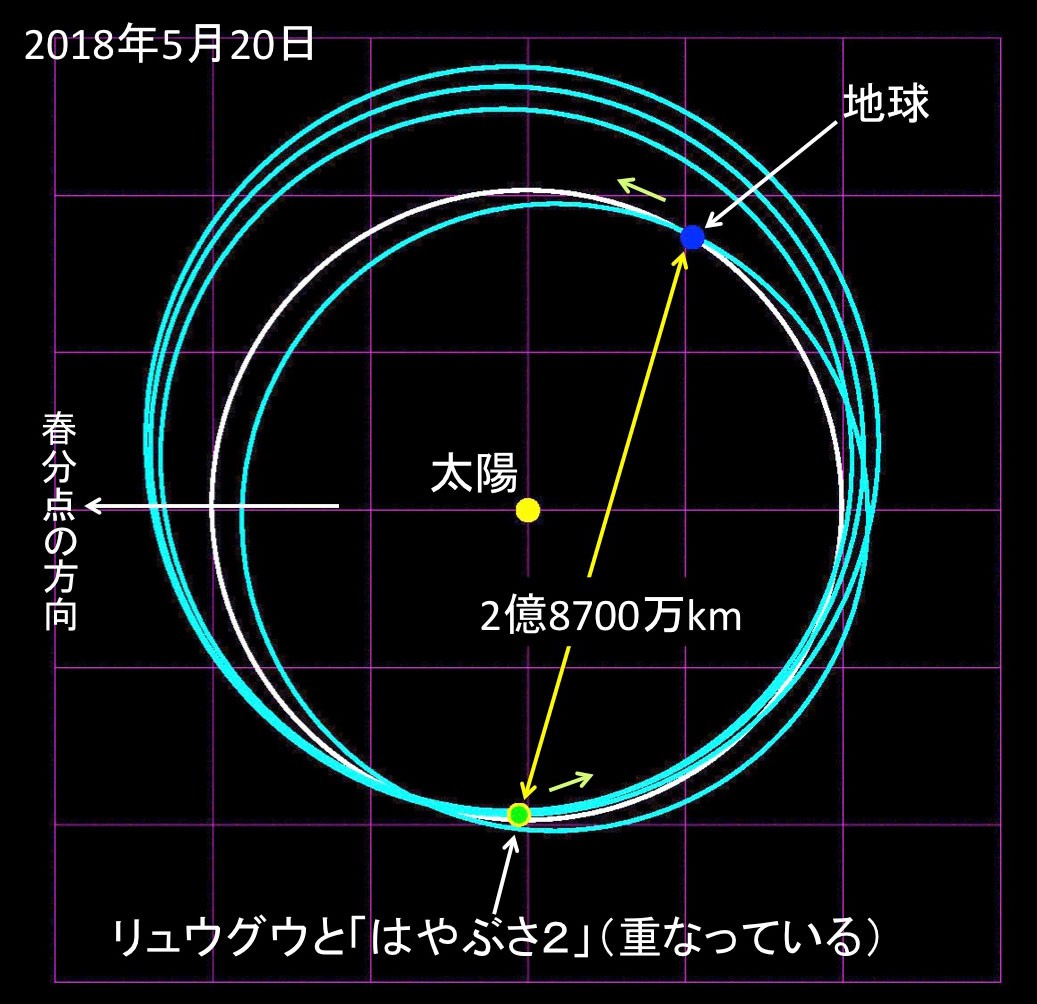 図1 2018年5月20日の「はやぶさ2」と天体の位置関係
図1 2018年5月20日の「はやぶさ2」と天体の位置関係
黄道面に投影したもの。春分点の方向を左向きに取ってある。天体は太陽のまわりを反時計回りに公転。 -
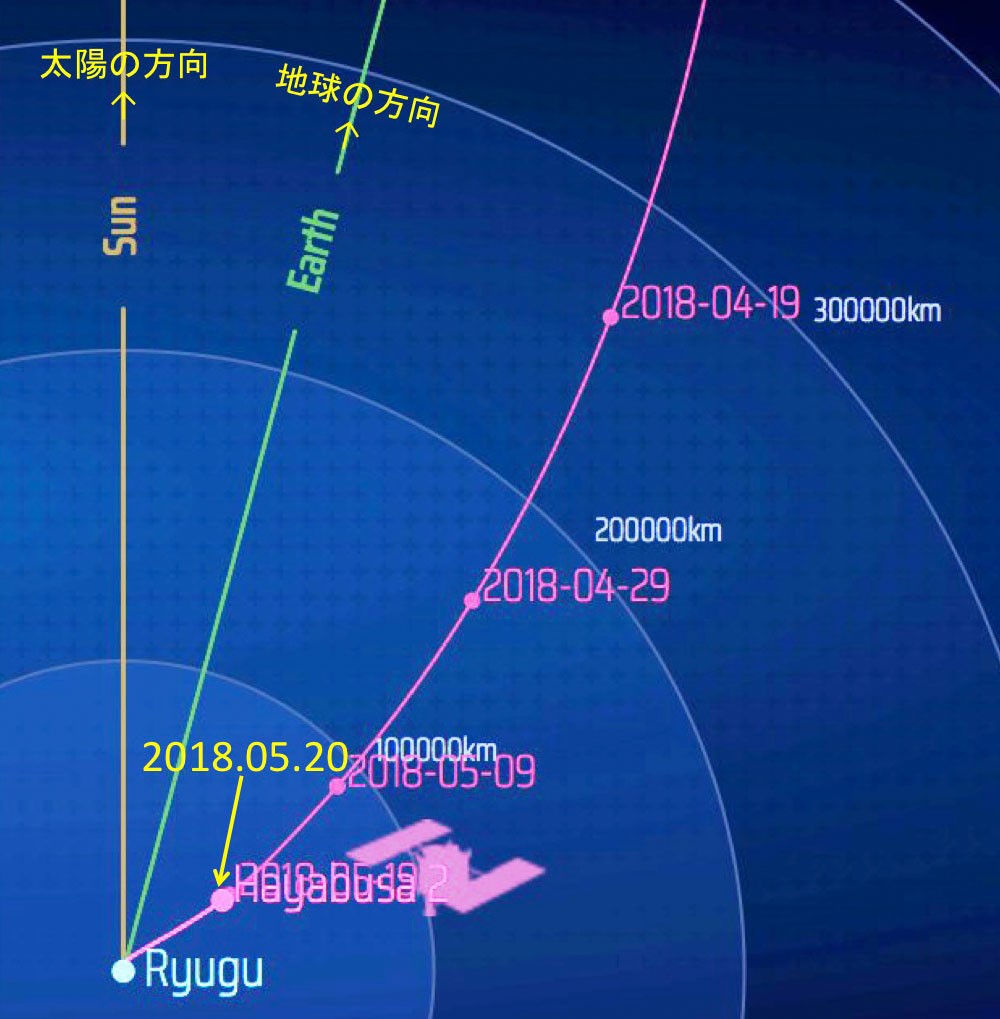 図2 2018年5月20日の「はやぶさ2」とリュウグウの位置
図2 2018年5月20日の「はやぶさ2」とリュウグウの位置
図1でリュウグウ付近を拡大した図。
惑星探査機の軌道は、通常は電波による通信で推定されています。従来の方法は、専門用語ではRARRと呼ばれています。これはレンジ(Range)・アンド・レンジレート(Range Rate)の略ですが、レンジとレンジレートを使った軌道推定ということです。レンジとは地球から測った探査機までの距離で、地球から電波を送って探査機から折り返してくる電波の伝搬時間を計ることによって計測されます。レンジレートとは、地球に対する探査機の視線方向の速度を求めるための計測で、送受信される電波の周波数から視線方向の速度を求めます。これは電波のドップラー効果を利用したものです。このRARRの方法ですと、3億km彼方にある探査機の軌道の位置誤差は300kmくらいになります。これでは、リュウグウに到着することはできません。
「はやぶさ2」では、RARRに加えてDDORという軌道推定の手法が使えます。これは、デルタ・ディファレンシアル・ワンウェイ・レンジというもので相対VLBIとも呼ばれています。VLBIとは、Very Long Baseline Interferometry(超長基線電波干渉計)のことです。DDORについては、『こちら「はやぶさ2」運用室: No.13』に説明がありますが、簡単に説明しますと2つのアンテナで同時に探査機と通信をして探査機の軌道を推定する手法です。このときに、クェーサーと呼ばれる電波星も観測し計測精度を上げることを行っています。このDDORという手法を使うと3億km彼方にある「はやぶさ2」の位置を数km程度の精度で推定できます。
これならリュウグウ到着は問題ないかというとそうではありません。リュウグウの位置にも誤差があるからです。2018年5月の時点でリュウグウの位置の誤差は約220kmと推定されています。ですから、「はやぶさ2」の位置が精度よく推定できたとしても、リュウグウに到着するのは不可能ということになってしまうのです。
そこで、光学航法を使うことになります。光学航法では、探査機からどの方向にリュウグウが見えるかが重要なデータになります。そのデータを取得するために、探査機に搭載されているカメラを使ってリュウグウを撮影します。リュウグウは、背景にある恒星と一緒に撮影されますが、恒星の位置は正確に分かっていますので、撮影された恒星の位置からリュウグウの見える方向が計測できます。今回は、普段は探査機に姿勢を推定するのに使われているスタートラッカを用いてリュウグウを撮影しました。
探査機から見たリュウグウの方向が分かるとリュウグウの軌道をより正確に推定することができることになります。模式的な図を描いてみると、図3のようになります。探査機から見てある方向にリュウグウが存在しているわけですから、これまでの観測で推定されるリュウグウの位置の誤差範囲から実際の位置をより正確に絞り込むことができるわけです。実際には、「はやぶさ2」に対する電波による航法と光学航法のデータを同時に解析することで、「はやぶさ2」とリュウグウの両方の軌道について同時に精度のよりよいものを推定することを行っています。
-
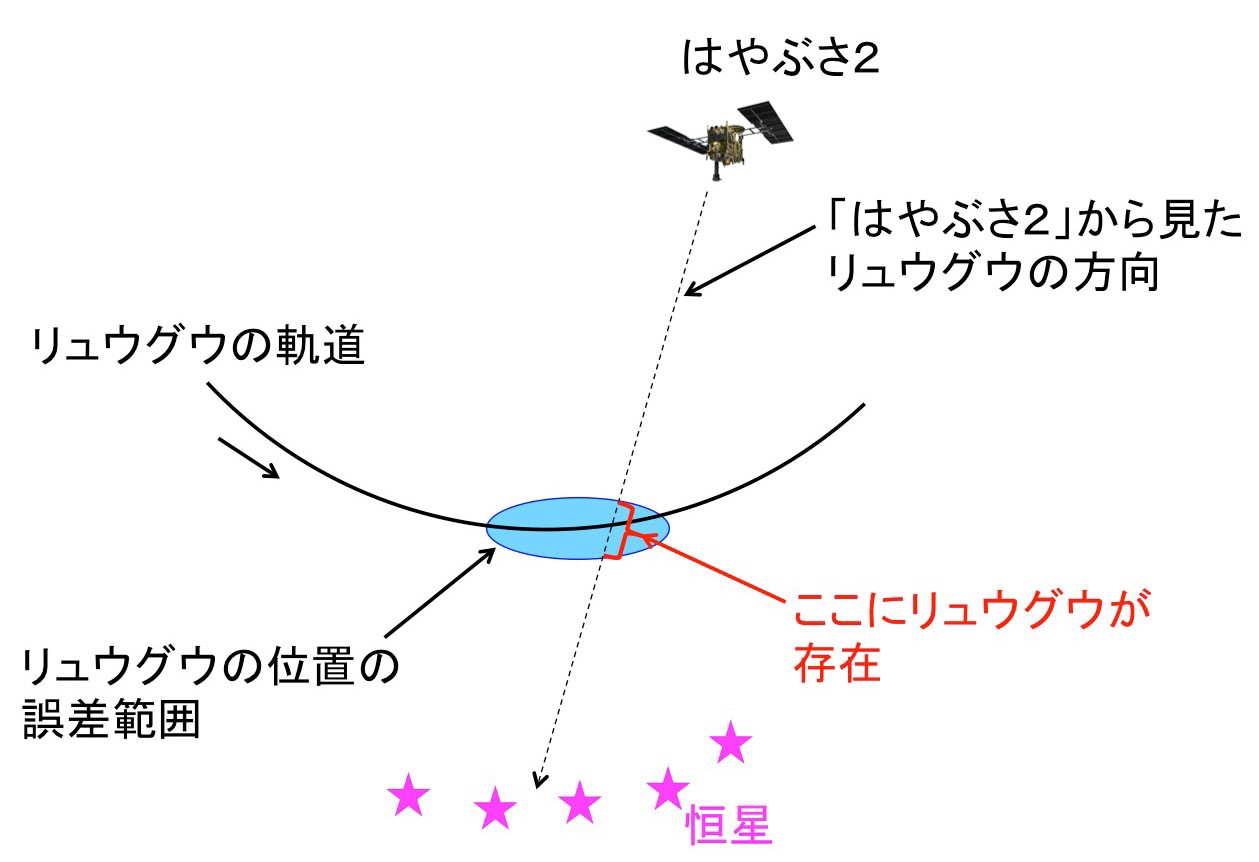 図3 「はやぶさ2」の光学航法の原理
図3 「はやぶさ2」の光学航法の原理
さて、以上説明してきたことを今回のスタートラッカによるリュウグウの撮影データを使った解析結果で説明してみましょう。図4は、「はやぶさ2」から見た星空で、その中にリュウグウが見える方向が線で描かれています。ここには光学航法によって軌道の精度を上げる前と後の軌道情報(リュウグウと探査機の両方の軌道)を使って、探査機からどの方向にリュウグウが見えるはずかを計算したデータと実際に観測されたリュウグウの位置が示されています。図4のスケールでは、光学航法前後の軌道と実際の観測とが重なっているので、どのくらい光学航法の効果があったのか分かりません。
-
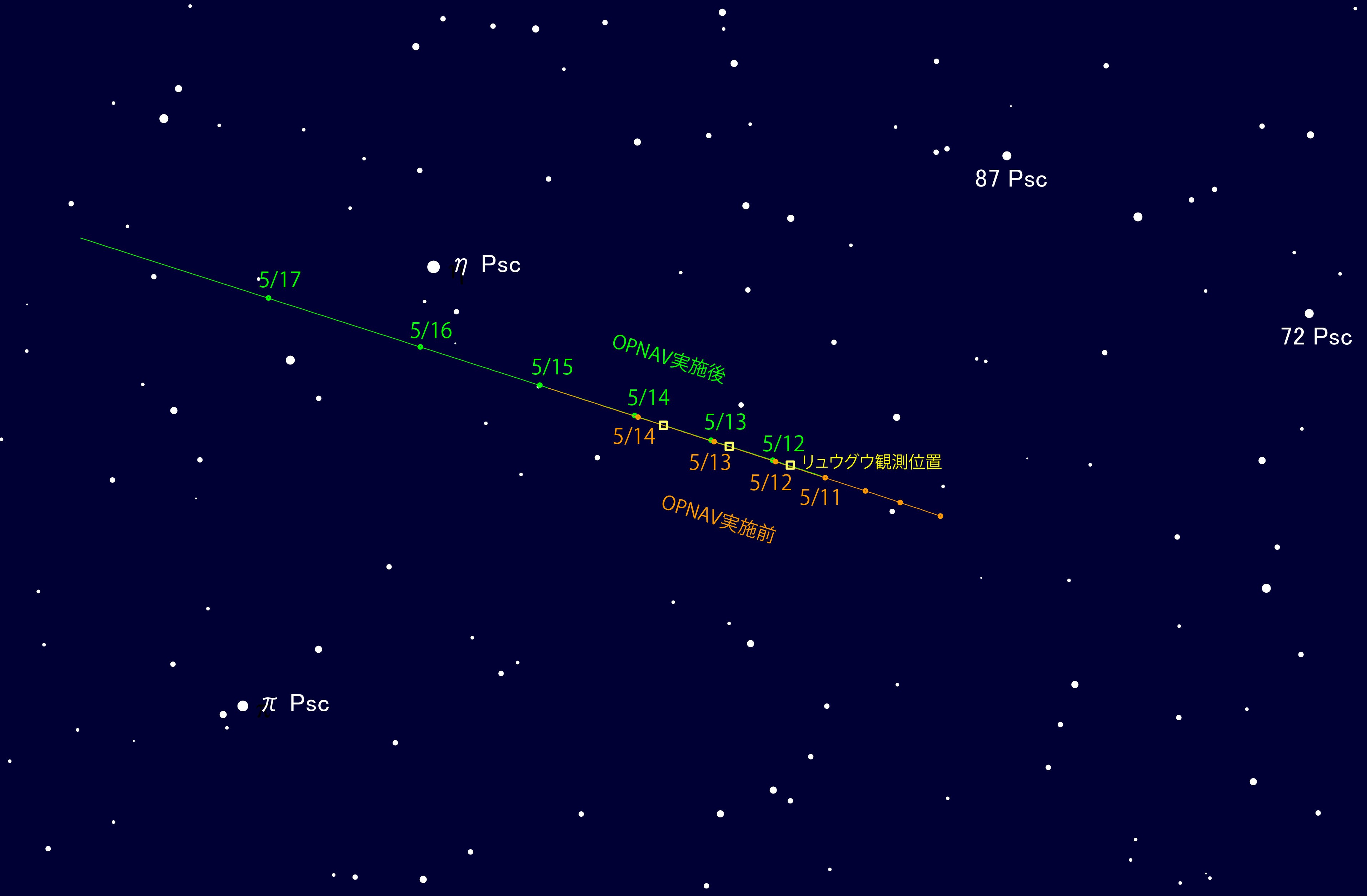 図4 スタートラッカによる光学航法の結果
図4 スタートラッカによる光学航法の結果
橙色:光学航法を行う前の軌道情報から計算した探査機から見たリュウグウの予想位置。緑色:光学航法によってより精度の高い軌道情報から計算したリュウグウの予想位置。黄色:実際に観測されたリュウグウの方向。
そこで、図4で5/13の観測付近を拡大してみました。図5になります。図5では、実際に観測された時刻と同じ時刻で、光学航法を行う前と後の位置がプロットしてあります。光学航法を行う前よりも光学航法後がずれが小さくなっていることが分かります。この図より光学航法によって探査機とリュウグウの位置がより正確になったことが分かります。
-
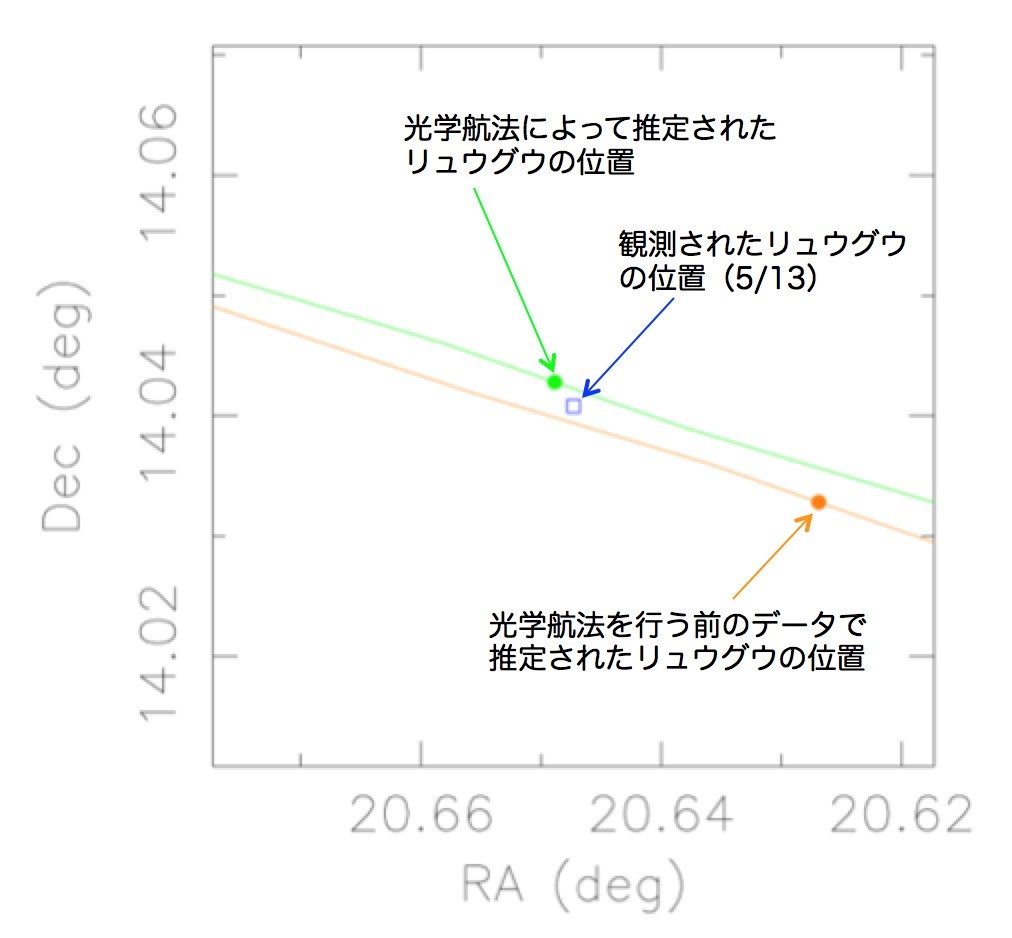 図5 光学航法の効果
図5 光学航法の効果
図4で5/13のリュウグウ観測位置の部分を拡大したもの。リュウグウを観測した時刻と同じ時刻において、光学航法の前と後の軌道とリュウグウの位置を示す。光学航法により推定された軌道が実際の観測に近づいたことが分かる。
今回の光学航法では、探査機の位置誤差が3km、リュウグウの位置誤差は130kmになりました。この誤差はまだ大きいですが、これは問題ありません。現在は、イオンエンジンを運転しているので、光学航法の結果はイオンエンジンをどのように運転するかに反映します。そして6月初めにはイオンエンジンの運転が終わり、光学航法カメラ(ONC)によるより精密な光学航法が始まります。このようにして確実にリュウグウに到着することができることになります。
※「はやぶさ」リバイバルコーナー
「はやぶさ」でも小惑星イトカワ到着直前に光学航法を行いました。最初は「はやぶさ2」と同様にスタートラッカによる撮影でした。そのときの状況は 2005年8月15日のWeb記事 に掲載されています。 「はやぶさ」では、「はやぶさ2」とは少し状況が異なります。「はやぶさ」では、イトカワの位置の誤差はリュウグウよりも小さいものでした。これは、イトカワに対してはレーダー観測が行われており、軌道がより正確に求められていたからです。リュウグウではレーダー観測ができなかったため、軌道の精度があまりよくありません。一方、「はやぶさ」そのものの軌道の精度は、DDORをきちんとできる機能がなかったので「はやぶさ2」よりもずっと悪い精度でしか推定できませんでした。そこで、イトカワという大きさが500m程度しかない小さいな天体にたどり着くために、光学航法によって「はやぶさ」の軌道についてより正確なものを求めました。
はやぶさ2プロジェクト
2018.05.25